
 |
什么?难道这不是一件相对轻松的小事吗?
事实并非如此简单明了。若是你对此有所怀疑,那就请继续阅读下面的内容吧。
在机器人控制柜中,伺服包负责为A5轴的电机提供电力。电机则通过传动轴以及一系列精密的传动齿轮,将动力顺畅地传递到A5轴的减速箱。在这个过程中,无论是电气动力回路还是机械传动回路,一旦出现任何异常状况,都极有可能导致A5电机的变频器输出电流异常增大,从而触发报警,显示A5轴的最大传动力矩超限。

接下来,需要对KUKA机器人报警信息进行详细的确认:
要确认机器人示教器上是否出现了“A5轴的最大传动力矩”的报警信息。
然后,仔细查找故障运行日志,看看是否还存在其他相关的报警信息,以便更全面地了解问题的根源。
在确认库卡机械手维修示教器报警无误,并且机器人没有发生任何干涉或碰撞后,可以尝试复位报警信息。这包括确认机器人处于无干涉状态,然后复位示教器上的报警信息,并选择合适的语句进行运行,直至达到BCO点。在切换到外部自动模式后,要确保机器人运行平稳无异常。在慢速操作过程中,也要再次确认机器人没有发生干涉或碰撞。
如果故障再次发生,需要进一步对机器人的A5轴进行单动测试。如果故障频繁再现,那么在确认无干涉后,需要降低手操速度至3%,并微动机器人A5轴。如果报警再次出现,就需要执行后续的更详细的检查步骤。也可以尝试单动其他轴,看看是否也会触发“A5轴最大传动力矩”的报警。如果问题依旧存在,那么可能需要考虑更换伺服包等更深入的维修措施。
如果故障只是以较低的频次偶发,那么需要对A5轴的电流进行监控,并与最近的监控数据进行对比,看看是否存在较大的攀升。如果电流攀升幅度较大,那么同样需要执行后续的详细检查步骤。如果电流无异常,那么可能是轨迹不良或者配重异常导致的,这时我们需要重新优化轨迹或调整配重。
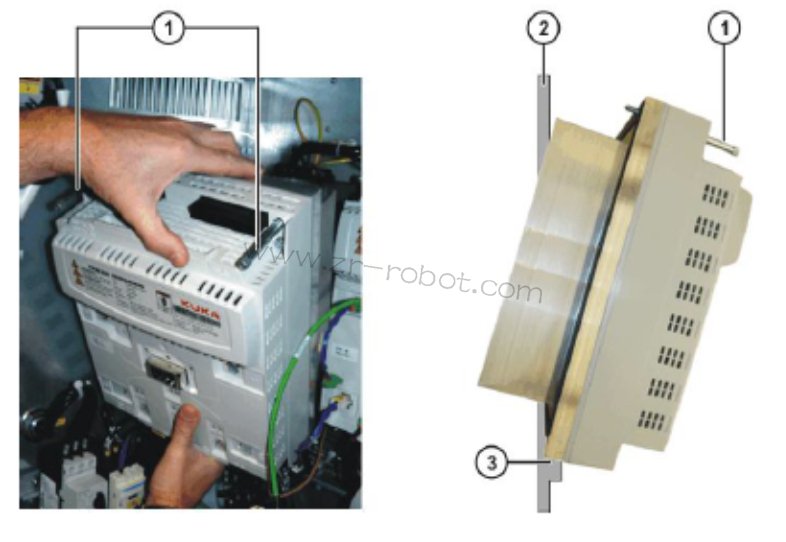
在更换4-6轴伺服包的过程中,需要关闭机器人控制柜的电源,然后拆卸原有的伺服包,并更换上新的备件。在接线无异常后,可以开机确认报警信息是否消除。如果开机后一切正常,可以再次单动机器人A5轴进行测试。如果故障依旧存在,那么可能需要执行更进一步的维修措施。
在更换伺服包的过程中,还需要注意一些安全事项,比如确认电源已经关闭并进行验电,以防止触电事故的发生。在接线无异常后,再送电进行测试。
怎么样?经过这样的详细解释,是不是觉得这个问题并没有那么简单呢?通过这个预案,我们不仅可以掌握机器人伺服电机好坏的测量判断方法,还可以学会如何处理库卡机械手维修A5轴扭矩过大的故障问题。从简单的复位报警信息到复杂的伺服包更换甚至中心手更换等步骤,这里都为你提供了详尽的答案。
转载请注明:可思数据 » KUKA库卡机械手维修A5轴力矩过大故障
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


