
 |
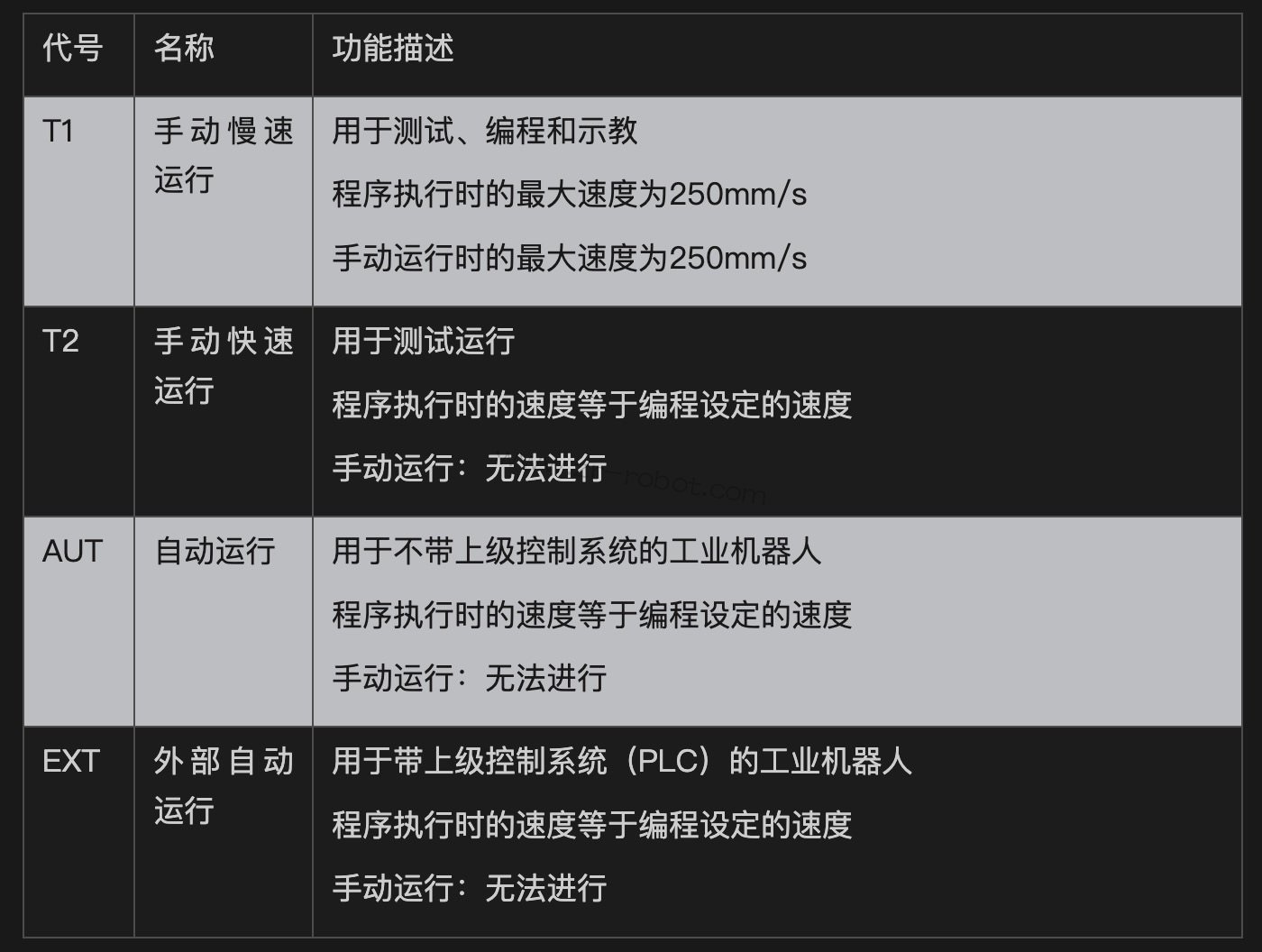
关于KUKA机械手维修的四种运行方式之间的差异,可以通过下图得到直观的展示。在进行机器人的调试工作时,对机器人的示教或编程,以及在点动运行模式下执行程序(涵盖了测试与检验等环节),通常可以采用手动运行的T1或T2两种方式。对于新的或者已经过修改的程序,为了确保其稳定性和安全性,必须始终先在手动慢速运行方式(T1)下进行全面的测试。

在操作注意事项方面,KUKA机械手示教器无疑是一种高度仿人操作、具备自动控制功能、可重复编程,并能在三维空间内完成各类复杂作业任务的自动化生产设备。其动作幅度大、运动速度快等特点,使得机器人在进行示教编程、程序编辑等操作时存在一定的危险性。这些操作必须由具备专业技能的人员来实施,并且必须严格遵守机器人的安全操作规程,以确保操作过程的安全与稳定。
在T1运行方式下,需要注意以下几点:先防护装置(如防护门)必须处于未激活状态;在不必要的情况下,不允许其他人员在防护装置隔离的区域内停留。如果确实需要多个工作人员在防护装置隔离的区域内停留,那么所有人员都必须能够清晰地看到机器人系统,并且相互之间也可以直接看到对方,以确保在紧急情况下能够迅速做出反应。操作人员必须选择一个合适的操作位置,使其能够清晰地看到危险区域,并能够及时避开潜在的危险。

在T2运行方式下,同样需要注意防护装置(防护门)必须处于未激活状态,并且在这种模式下严禁进行示教操作。在测试前,必须确保确认装置的功能完好无损,以避免因设备故障而导致的安全事故。操作位置必须处于危险区域之外,以确保操作人员的安全。还应确保人员位于由防护装置隔离的区域之外,以防止意外事故的发生。
对于自动和外部自动运行方式,需要注意的事项包括:必须配备完善的安全和防护装置,并且这些装置的功能必须正常有效。应始终位于由防护装置隔离的区域之外,以确保在机器人运行过程中不会受到任何伤害。
在运行模式切换方面,KUKA机械手维修在运行之前可以根据实际需求选择合适的运行方式。选择机器人运行方式的操作步骤如下:在示教器smartPAD上转动用于连接管理器的开关;连接管理器会显示在smartHMI上,可以选择相应的运行方式;将用于连接管理器的开关再次转回初始位置,所选的运行方式就会显示在smartPAD的状态栏中。通过这一系列的步骤,可以轻松实现机器人运行模式的切换。
综上所述,库卡机器人维修的四种运行方式各有其独特的特点和适用场景。操作者在实际操作中应根据具体需求选择合适的运行方式,并严格遵守相关的操作规范和注意事项。只有这样,才能确保机器人的高效、安全运行,为生产带来更大的效益。
转载请注明:可思数据 » KUKA机器人维修四种运行方式异同
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


