
 |
关于标定方法,主要采用以下两种:
一是外部基准法,它主要依赖于机器人系统外部的已知基准点或基准面来实施标定。具体而言,操作人员需将工具精确地对准这些预设的基准点或基准面,从而完成整个标定过程。此法以其操作简便、流程快捷而著称,其准确性及稳定性在很大程度上取决于外部基准的精确度与稳固性。
二是多点标定法,它涵盖了TCP位置的多点标定与工具坐标系(TCF)姿态的多点标定两大方面。在实际操作中,我们常采用四点法、五点法及六点法等常用方法,通过巧妙地设置多个标定点,并确保TCP位置在这些点上重合或形成特定的方位关系,进而借助精密的数学计算,得出TCP的精确位置以及工具坐标系相对于末端关节坐标系的姿态。
在KUKA机器人维修标定步骤方面,需严格遵循以下流程:
首先是准备阶段,确保机器人系统已接通电源并处于安全模式,准备好所需的标定工具,如标定球、标定板等关键设备。登录到机器人控制柜的操作面板,并进入程序编辑或手动操作模式,为后续操作做好准备。
接着是选择工具坐标系,在库卡机器人维修示教器或控制软件中,精心选择或新建一个工具坐标系,并确保其数据处于初始状态,以便进行后续的标定工作。
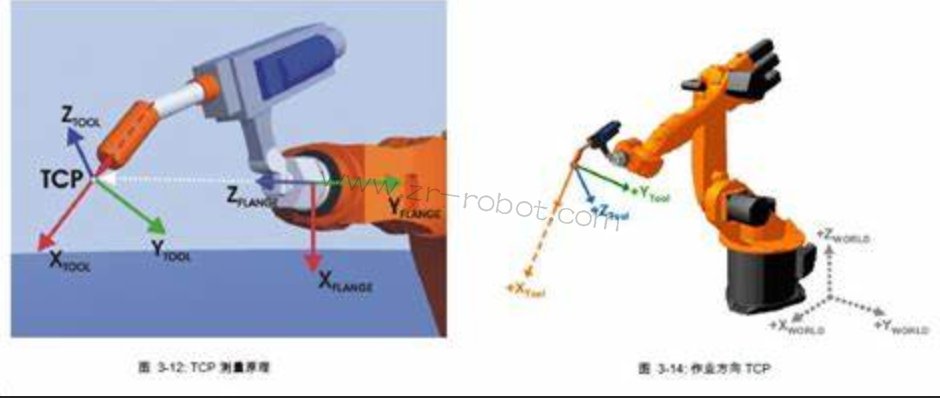
然后是进行TCP位置标定,按照所选的标定方法(如四点法),将工业机器人末端执行器精准地对准各个标定点,并仔细记录或确认每个标定点的坐标值,为后续计算提供准确的数据支持。
在KUKA机器人维修TCP位置标定的基础上,还需进行TCF姿态标定。根据五点法或六点法的具体要求,操作机器人移动到特定的标定点并记录相关数据。这些数据将作为计算工具坐标系相对于末端关节坐标系姿态的重要依据。

在收集到所有必要的标定点数据后,使用机器人控制软件或机器人示教器进行精密的计算。仔细检查计算结果是否符合预期的精度要求。如果满足要求,则保存工具坐标系数据并激活该坐标系,为后续的工作提供有力保障。
在标定完成后,还需进行测试运行以验证TCP的准确性和稳定性。如果机器人故障运动不符合预期,则需根据实际情况微调标定参数并重新进行标定,以确保机器人能够始终以最佳状态执行任务。
综上所述,在库卡机器人维修TCP标定过程中,外部基准法与多点标定法各有千秋。外部基准法以其操作简便、流程快捷而备受青睐,但其精度可能受到外部基准的影响;而多点标定法则以其高精度而著称,但操作相对复杂且耗时较长。因此,在选择标定方法时,我们需根据具体的应用场景和需求进行权衡与选择。如果对精度要求较高,可以考虑使用多点标定法;如果对精度要求不是特别高,或者需要快速标定,则可以考虑使用外部基准法。
转载请注明:可思数据 » 库卡机器人维修-TCP具中心点标定
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


