
 |
使操纵器工作的指令称为行为准则。它可以分为PTP动作命令、CP动作命令、曲线动作命令和联合动作命令。CP模式,即连续路径模式。用于确定PTP动作和共享动作命令、SPEED和ACCEL速度以及加速/减速。指定CP使用模式操作指南时的速度和加速度。爱普生六轴机器人动作指令有哪些?
(爱普生)
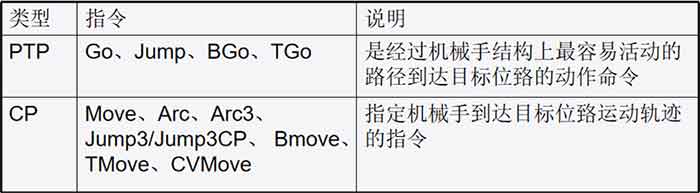
PTP指令
包括说明:开始。跳BGo公司。遇见
PTP(PoseToPose)动作是一种以操纵器工具顶部为目标的动作方法,与其路径无关。PTP动作使用为每个关节配置的电机,以便操纵器通过最短路径到达目标位置。
优点:移动速度快;弱点:不可预测的运动轨迹。PTP使用操作速度、加速/减速、speed和ACCEL。
执行说明
功能:整个轴的同时PTP操作。动作线从当前点输入每个关节的目标坐标。
格式:移动目标坐标
例子:
1.GoP1机械手动操作P1点
2.GoXY(50400,0,0)机械手动工作X=50,Y=400,Z=0,U=0
3.GoP1+X(50)机械手动P1点X坐标移动+50个位置
4.GoP1:X(50)机械手动操作P1点对应于X坐标值为50的位置
2.2跳转指令
功能:通过“门动作”将手从当前位置移动到目标坐标。
格式:跳转目标坐标
例子:
1.JumpP1操纵器移动P1点“门动作”
2.JumpP1LimZ-第三轴10Z=-10 Gate活动的目标坐标移动到点P1,如1所示。
3.JumpP1:Z(-10)LimZ-第三轴上的目标坐标10Z=-10门活动移动到PZ坐标值为-10的点
注:
Go和Jump之间的区别Jump和Go使用机器人的PTP运动命令。跳转具有Go功能。跳跃首先将操纵器的手举至LimZ,然后水平移动手。当它接近目标坐标时,它会下降。该活动的标准是更准确的避障,更重要的是,通过吸附和配置改善工作循环时间。
CP指南
包括说明:移动。弧形。弧形。弧形。Jump3/Jump3CP。BM公司。TM。CV移动
CP(连续路径)命令可以设置为处理程序到达目标位置的路径。
优点:轨迹可控,运动平稳。缺点:速度慢。
指定“线性”使用速度和加速/减速、SPEEDS和ACCELS。
移动命令
功能:将操纵器从当前位置移动到指定的目标位置。整个成员同时开始和结束。
格式:移动目标坐标
示例:MoveP操纵器沿直线移动P1点
注:
当Move and Go到达目的地时,如果手的位置很重要,请使用Go,但如果在动作中控制手的轨迹更重要,则使用Move。如果SCARA操纵器仅在Z轴上上下移动,则Go轨迹与Move轨迹相同。
Arc和Arc3指南
功能:圆弧XY级别的圆弧插补动作。
Arc3将三维地添加到空间中。
格式:弧坐标后,目标坐标
注:操纵器通过从当前位置到目标坐标的圆弧输入坐标。自动计算给定3个点(当前坐标)、通过坐标和目标坐标的圆弧插补路径,并沿该路径将操纵器移动到目标坐标。
示例:ArcP2、P3
注:
即使目标坐标在操纵器的范围内,如果移动路径Move或Arc超过允许的运动范围,操纵器也会突然停止,从而对伺服电机造成冲击,并导致故障风险。为避免此类事件,请在快速加注前以低速确认动作范围。
Jump3/Jump3CP指南
此功能可使手在三维门形状中移动。Jump3是两个CP操作和一个PTP操作的组合
Jump3格式避免坐标,接近发射和目标坐标
转载请注明:可思数据 » 爱普生六轴机器人动作指令有哪些?
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


