
 |
本文探讨机器人控制系统的安全风险以及有效的安全措施,文中除了探讨产业安全标准,并分析了遵循这些标准的关键要求。
工厂自动化是工业4.0的核心,包括工业机器人、自主式行动机器人(AMR)、以及协作式机器人等皆扮演关键角色,并共同促成业界实践现代的工业4.0。如今的机器人变得越来越聪明,并具备更高的协作能力,不论在有人与无人操作的情况下都能执行各种复杂任务。更高层级的自动化以及更广泛地运用机器人,亦促成对机器人控制系统面临着更高的物理维安,以及资安抗骇的要求。
从机器人最初大多应用於工厂环境,发展至今已广泛用在诸多不同领域,包括医疗、军事、物流、以及农业等。对於物理维安与资安抗骇的需求而言,此方面的重要性远甚过於10年前。相关的应用场域中,各种意外都可能发生,其中,由恶意攻击引发的事件尤其关键,恶意劫持与控制机器人都可能造成严重的经济与财务损失。
机器人控制系统的安全风险
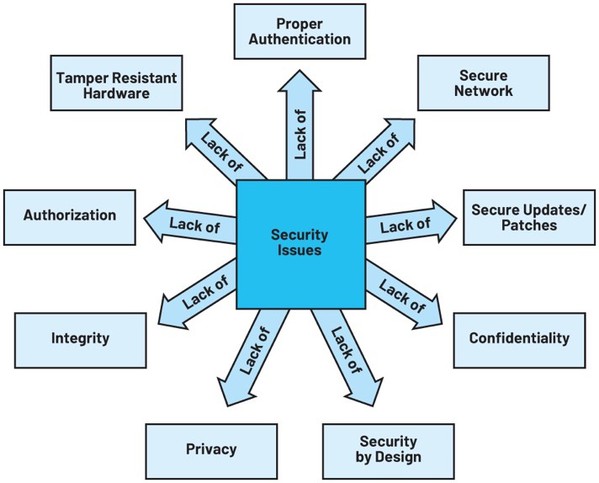
图一显示典型的安全风险,可能引发对机器人控制系统的恶意攻击。
|
表一所列举的是与安全风险相关的疑虑及概述:
|
缺乏 |
冲击与描述 |
|
安全联网 |
导致机器人控制系统之间的通讯变得不安全,且容易被伪冒、窜改、以及窃听。同时也可能冲击到系统的可用性 |
|
正确的验证 |
|
|
机密性 |
缺少加密或弱防御力的加密演算法,导致机器人机敏资料与设计计画被拦截与外泄 |
|
完整性 |
导致储存或传输中的机器人机敏资料、组态设定、以及韧体遭到窜改 |
|
安全开机与更新 |
|
|
防窜改硬体 |
某些机器人储存着高度机敏的资讯(像是军事/国防领域所采用的机器人)。因此此类资讯需要被高度保护,以防被非授权人士存取。若没有防窜改硬体,就非常难以保护资讯免於遭受侵入攻击 |
|
安全设计原则 |
大多数控制系统的发展,直到最近都没有采取安全设计原则。这导致了有心人士侵入进机器人系统的架构与设计,进而扫描与滥用其漏洞以便发动攻击 |
|
更新 |
机器人作业系统、韧体、以及软体若是缺乏更新,可能导致各种网路物理攻击 |
工业与机器人领域的规范与法律 促进资安韧性与保护运作
资安领域的面貌快速演变,越来越多的规范与法律也瞄准工业与机器人领域。其中一些针对资安抗骇的法律,包括《欧盟网路安全法》、《欧盟网路韧性法》以及《美国关键基础设施资安事件通报法》。另外中国与印度也逐步制定相关的规范与法律。 美国国家标准与技术研究院(National Institute of Standards and Technology;NIST)的操作技术(OT)安全指南 ,以及如IEC 62443 此类标准提供方向,让我们能采取安全设计(secure-by-design)的原则与设计,协助开发的控制系统能具备充分的韧性,得以抵御各种网路攻击。
IEC 62443制定 IACS 安全性规范
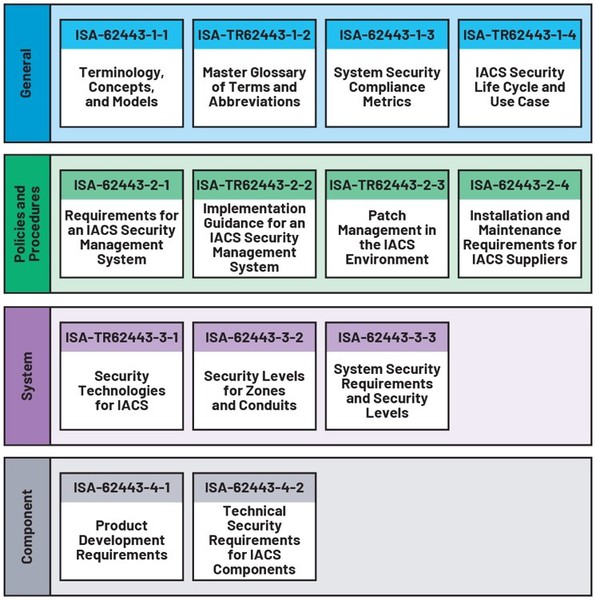
IEC 62443针对工业自动化与控制系统安全(Industrial Automation and Control Systems Security;IACS)制定了安全性规范。此为一项各界广泛采纳的标准,用以开发工业自动化控制系统,大多数的法律和规范也都建议遵循这项标准,并认可其在保障安全方面的重要性,让我们能够遵循相关规范、??解控制系统中的潜在资安风险、补救控制系统中的安全缺囗、保护关键资产、以及提供其他更多的益处。
|
虽然IEC标准中有一些部分是专注规范过程与程序,不过IEC 62443-4-1和IEC 62443-4-2则是专门针对组件安全而制定。根据IEC 62443-4-2的规范,零组件的种类包含了软体程式、主机装置、嵌入式装置、以及网路装置。这些标准根据每种零组件必须达到的零组件要求(CR)和增强要求(RE)来为每种零组件类型规范功能安全等级(SL)。其定义了从SL0到SL3的安全等级(SL)。其中SL2与SL3特别要求硬体层面的安全防护。
开发机器人安全系统不可或缺的功能与技术
要建构安全的机器人控制系统,我们需要解决机器人控制系统安全的各项风险。此方面需要的关键功能与技术包括:
u 安全验证:汇整各项安全验证机制,检验装置/零组件的身份
u 安全协同处理器:运用专属硬体执行安全储存与加密作业
u 安全通讯:建置加密协定,保护资料交换的程序
u 存取控制:实施细分的权限,用以限制未经授权的系统存取动作
u 实体安全措施:整合各项措施,藉以防止物理窜改
全套输出式安全IC,像是安全验证晶片与协同处理器,为了因应这些需求量身打造的方案,能简化建置流程与节省成本。这些固定功能IC背後有完备的软体堆叠作为辅助,这些软体是针对主机处理器所设计。
运用分立式安全元件可以提高系统韧性,防止已被入侵的应用处理器去存取储存在独立IC(隔离)内的权证。
除了这些方面之外,系统开发者必须采取结构化的方法来保护开发程序,包括收集各项需求、建立与分析威胁模型、安全设计、实施、测试、认证、以及维护等方面。依循安全开发生命周期(SDL)可确保从一开始安全即融入到开发程序之中。
ADI不仅是供应晶片等整套输出式安全IC的厂商,藉由整合安全与机器人方面的专业技术,已蜕变成一个理想的解决方案供应商,能够克服在维护机器人系统方面衍生的各种独特挑战。让客户能够建构出全方位的解决方案,兼顾硬体、软体、以及系统层级的设计考量。
ADI认识到机器人系统的安全需要全面覆盖的设计,因此决定跳脱出零组件层级的方案,采取系统层级的视野角度。我们衡量了各种因素,包括硬体、软体、通讯、以及整合,确保所有关键零组件都无缝地整合。
ADI与汽车产业的合作,展现在无线电池管理系统(wBMS)的成果上,并反映在建构强韧安全措施上的诸多卓越能力。ADI藉由与客户紧密合作,成功开发出一套完全维安与抗骇的ISO 21434认证wBMS系统。鼓励机器人产业进行类似的合作,就能促成客户运用ADI在安全实作方面的专业。藉由和相关产业夥伴的紧密结盟,ADI得以持续发展兼顾物理维安与数据资安的机器人系统,引进从汽车产业所累积的经验与成功战绩。
机器人关节控制器的使用情境范例
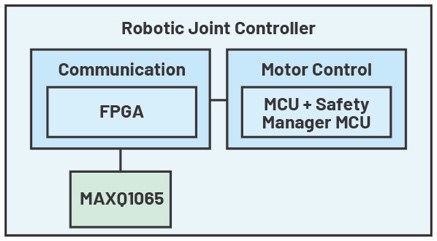
图三显示在机器人关节中,机器人关节控制系统的系统设计。
|
在这项设计中,MAXQ1065的潜在应用变得显而易见,因为它能促成安全开机功能,进而提升系统的整体安全。此外,MAXQ1065本身还具备诸多额外功能,例如安全密钥储存、安全通讯协定、以及译密作业等。後续的专文将深入探讨这些应用情境,以及探讨其实际应用。
总结
在维护未来机器人的安全方面,资安扮演十分重要的角色。包括安全验证、加密通讯、供应链防骇等强韧措施,皆是防范各种威胁极为关键的环结。藉由优先维护资安以及运用ADI的专业,不仅能够充分发挥机器人的潜能,还能够防范在互连世界中各种新浮现的风险。
转载请注明:可思数据 » 确保机器人的安全未来:资安的角色
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


