
 |
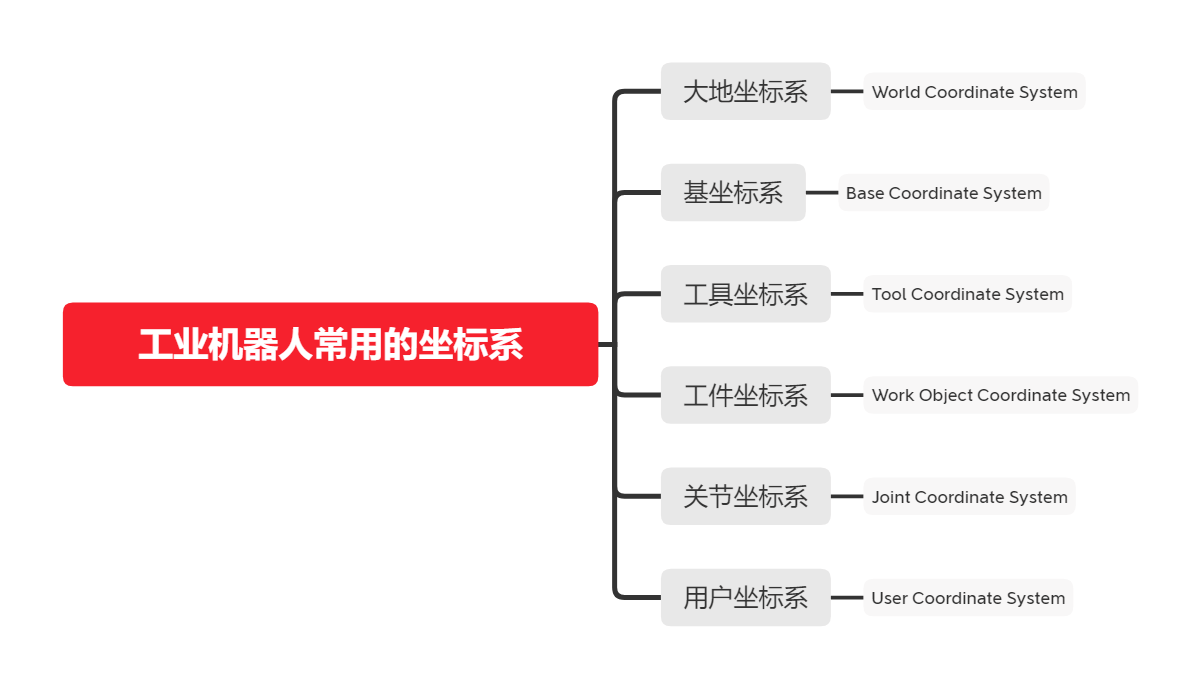
工业机器人常用的六种坐标系
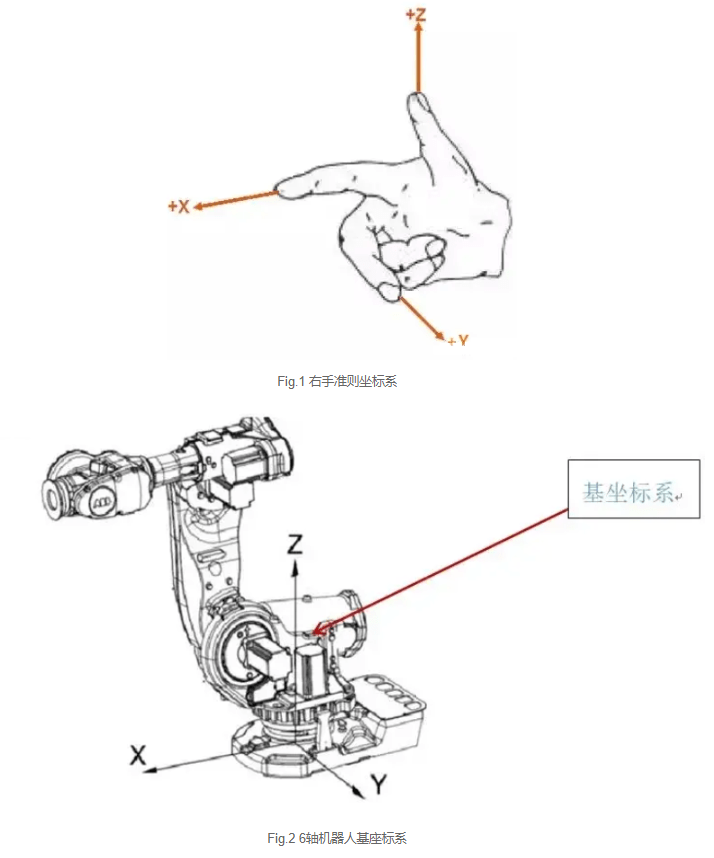
1. 基坐标系
基坐标系是以机器人安装基座为基
准、用来描述机器人本体运动的直角坐标系。
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。坐标系遵守右手准则:
2. 大地坐标系
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
(1)机器人倒装。
如下图3所示,倒装机器人的基坐标与大地坐标Z轴的方向是相反,机器人可以倒过来,但是大地却不可以倒过来。
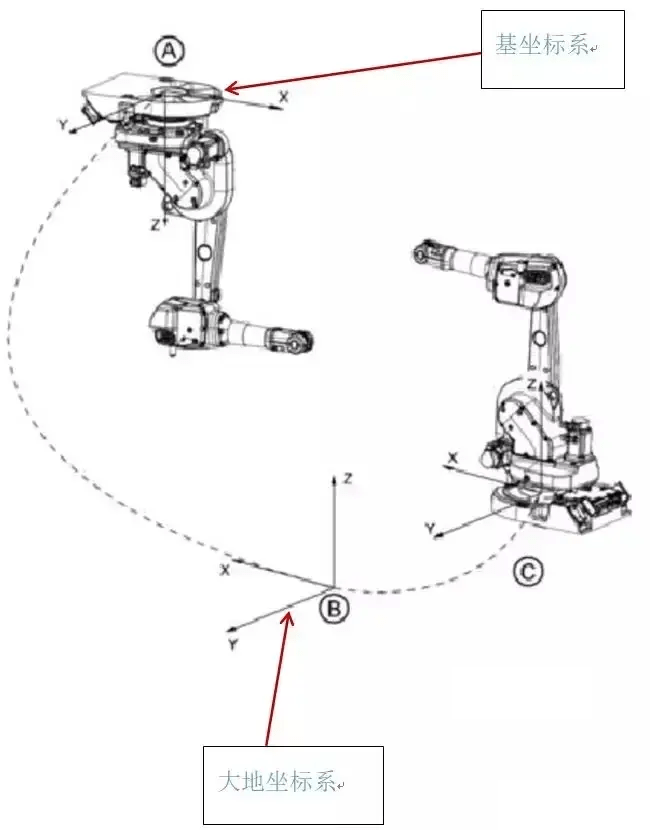
Fig.3 6轴机器人大地坐标系
(2)带外部轴的机器人。如下图4所示,大地坐标系固定好位置,而基坐标系却可以随着机器人整体的移动而移动。
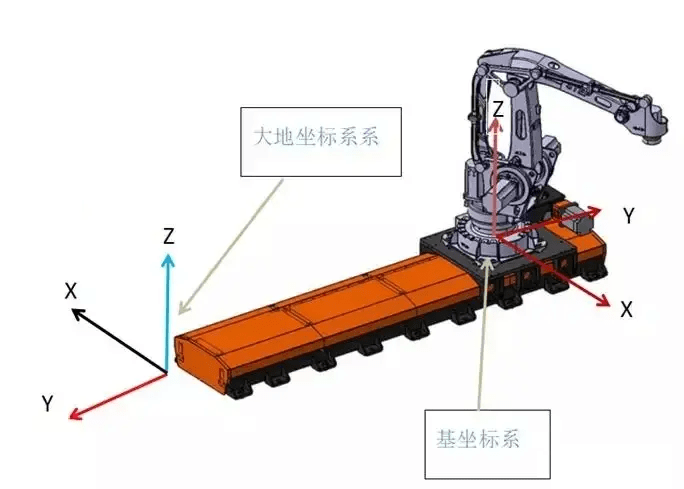
图4 大地坐标系
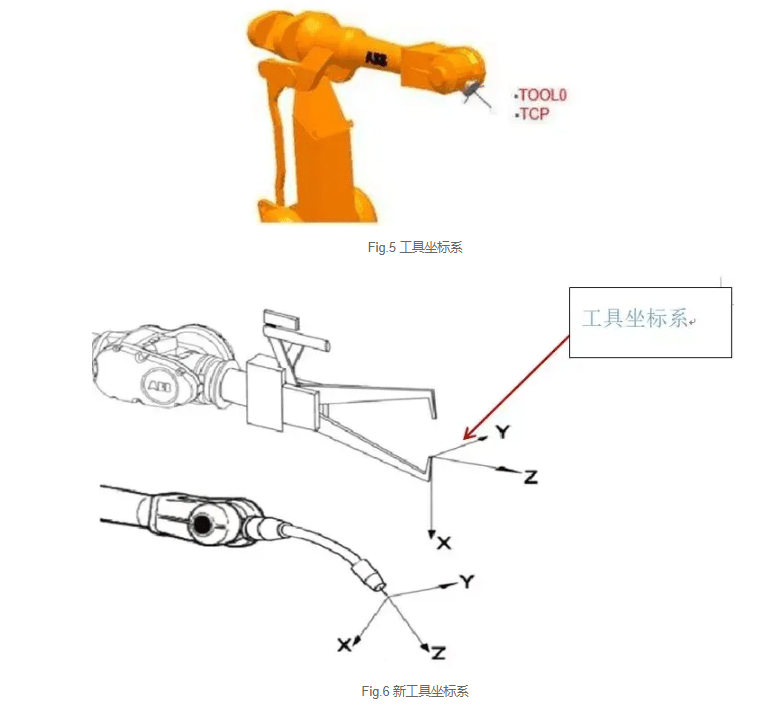
3. 工具坐标系
什么是工具坐标系
工具坐标系:固定在工具(法兰、装在法兰上的工具)上的坐标系
特点:相对与机械手法兰中心不变。
工具坐标系原点(TCP):机械手运动中心点。
机器人TCP 是(TOOL CENTER POINT),是指机器人安装的工具工作点。
为什么要建立工具坐标系
机械手在出厂时都有一个默认的工具坐标系Tool 0:位置在法兰中心。但机械手实际运动中往往会在法兰中心安装吸盘、焊枪、气缸等工具。此时若机械手运动中心依然在法兰中心,会造成很大的不便。因此根据实际情况去示教需要的工具坐标系就显得必要。
工具坐标系:是以工具中心点作为零点,机器人的轨迹参照工具中心点,不再是机器人手腕中心点Tool0(如图5)了,而是新的工具中心点(如图6)。
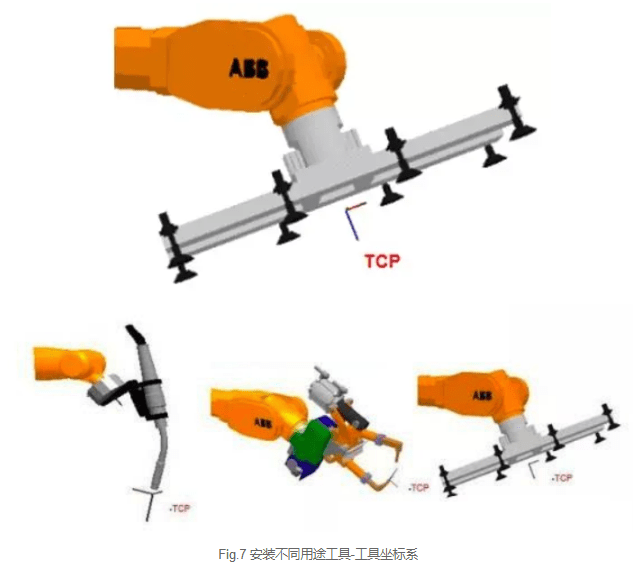
例如:焊接的时候,我们所使用的工具是焊枪,所以可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面(如下图7所示)。
工具坐标系可采用N(N>=4)点法确定:机器人TCP通过N种不同姿态同某定点相接触,得出多组解,通过计算得出当前TCP(Tool Central Point,中文叫做工具中心点)与工具安装法兰中心点(tool0)的相应位置,坐标系方向与tool0一致。
Fig.8 工具坐标系标定
4. 工件坐标系
工件坐标系:工件坐标系是以工件为基准的直角坐标系,可用来描述TCP运动的坐标系。
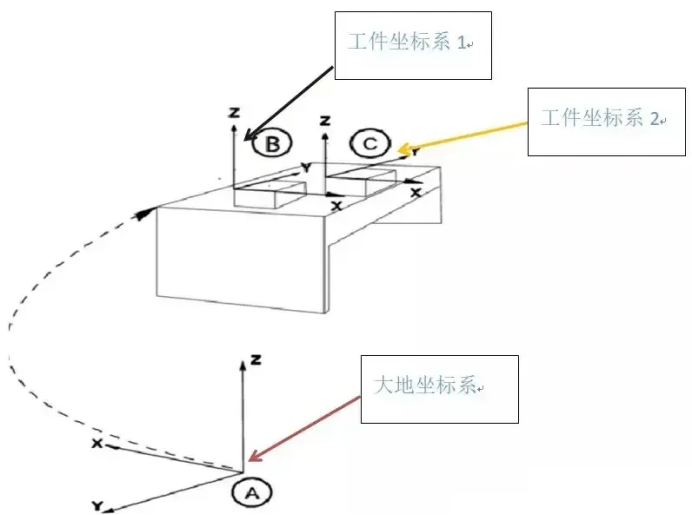
Fig.9 工件坐标系
充分利用工件坐标系能让我们编程达到事半功倍的效果。
例如:机器人加工工件1,轨迹编程已经编好,另外有工件2,轨迹不需要重复编程只要把工件坐标系1改为工件坐标系2即可。
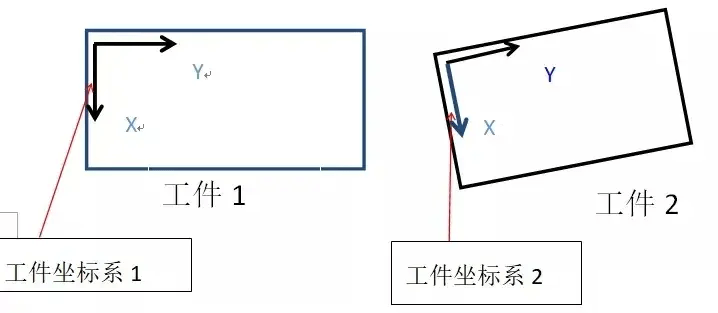
Fig.10 不同工件坐标系
工件坐标系用来确定工件的位姿,它由工件原点与坐标方位组成。工件坐标系可采用三点法确定:点X1与点X2连线组成X轴,通过点 Y1向X轴作的垂直线为Y轴,Z轴方向以右手定则确定。
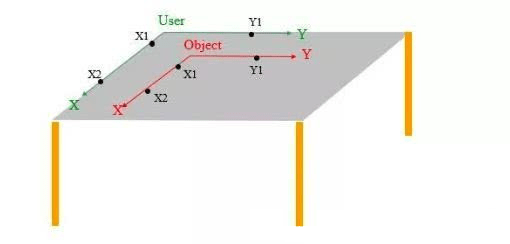
Fig.11确定工件坐标系的方法
5. 关节坐标系
关节坐标系是设定在机器人关节中的坐标系,它是每个轴相对其原点位置的绝对角度。
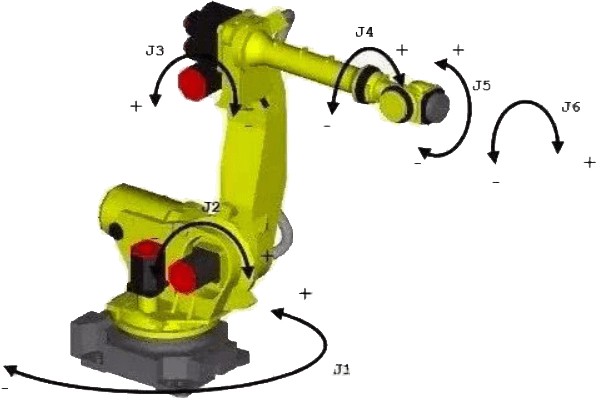
Fig.12 机器人关节坐标系
6. 用户坐标系
用户坐标系是用户对每个作业空间进行自定义的直角坐标系,它用于位置寄存器的示教和执行、位置补偿指令的执行等。在没有定义的时候,将由大地坐标系来替代该坐标系。
转载请注明:可思数据 » 工业机器人工业机器人常用的六种坐标系
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


