
 |
在自动驾驶技术的赛道上,特斯拉始终是无法绕开的标杆性存在。其 Full Self-Driving(FSD)系统的每一次版本迭代,不仅牵动着车主与投资者的神经,更深刻影响着全球自动驾驶行业的技术路线选择。从早期依赖显式代码的模块化架构,到 2024 年 V12 版本开启的 "端到端" 革命,再到 2025 年 V14 融入 Robotaxi 技术基因,特斯拉用十余年时间走出了一条独特的技术演进路径,既彰显了数据与算力驱动的强大势能,也暴露了自动驾驶落地进程中的复杂挑战。
一、架构之变:从模块化拆分到端到端融合
自动驾驶系统的核心本质,是解决 "从环境感知到车辆控制" 的决策链路问题。特斯拉 FSD 的演进,首先体现在对这一链路的重构上 —— 从机械的模块拆分走向有机的端到端融合,背后是硬件算力的持续突破与软件理念的根本转变。
1. 硬件奠基:全栈自研的算力进化
FSD 的每一次软件飞跃,都以硬件升级为前提。特斯拉的硬件演进之路,清晰地勾勒出从 "依赖外供" 到 "自主可控" 的转型轨迹:
- HW 1.0(2014 年):作为特斯拉自动驾驶的起点,这套系统完全依赖外部供应链,配置包括 Mobileye 提供的前置单目摄像头、博世 77GHz 毫米波雷达(探测距离 160 米)、12 个超声波传感器(探测距离 5 米),以及 Mobileye EyeQ3 计算平台。此时的硬件仅能支撑基础的辅助驾驶功能,算力局限使其难以承载复杂计算任务。
- HW 2.0(2016 年):与英伟达合作开发的 Drive PX2 平台成为核心,摄像头数量增至 8 个,算力提升至 12 TOPS,达到 HW 1.0 的 48 倍。更重要的是,特斯拉在这一阶段悄然启动自研计划,为摆脱外部技术依赖埋下伏笔。
- HW 3.0(2019 年):搭载两颗自研 FSD 芯片的硬件系统正式装车,标志着特斯拉迈入全栈自研时代。双芯片架构提供的强大算力,为后续神经网络模型的扩容奠定了基础,也让 "用数据训练替代代码编写" 成为可能。
- HW 4.0(2023 年起):作为支撑 FSD V14 的核心硬件,其算力较 HW 3.0 实现数倍提升,能够处理更大参数量的端到端模型,同时优化了对高分辨率摄像头数据的处理能力,成为 Robotaxi 功能落地的关键支撑。
这套硬件升级逻辑并非 "性能炫技",而是精准匹配了软件从 "规则驱动" 到 "数据驱动" 的需求 —— 神经网络模型的参数量与数据处理量呈指数级增长,必须有自主可控的强大算力作为保障。
2. 软件革命:端到端的范式突破
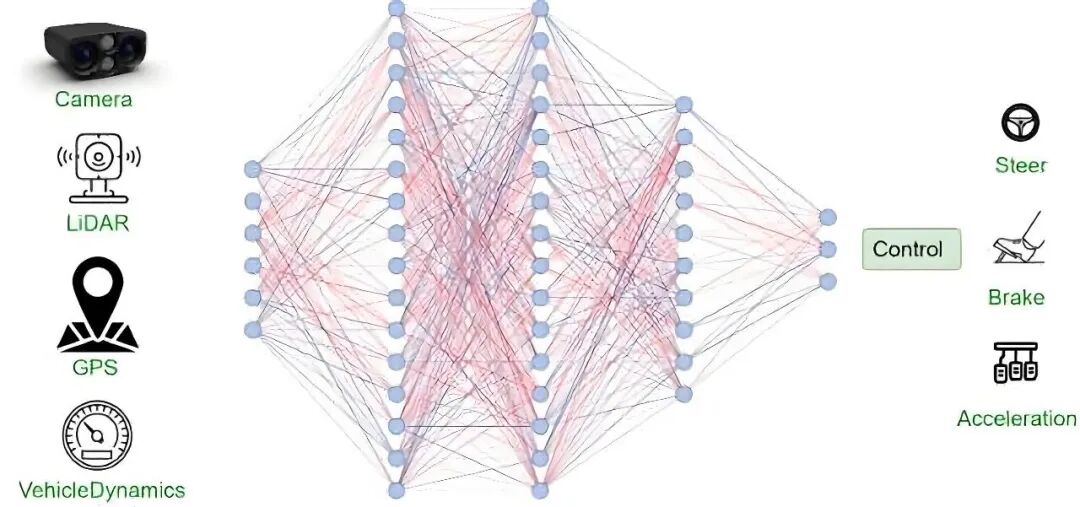
如果说硬件是基础,软件架构的演进则是 FSD 的灵魂。传统自动驾驶系统遵循 "感知 — 定位 — 预测 — 规划 — 控制" 的模块化拆分思路,每个环节都依赖工程师编写显式 C++ 代码和规则来完成任务。这种模式在简单场景下可行,但面对复杂多变的真实道路,极易出现 "模块衔接漏洞" 和 "规则覆盖不足" 的问题。
2024 年推出的 FSD V12(标注 "Supervised"),成为特斯拉软件架构的分水岭。该版本正式确立 "端到端" 核心路线,提出 "photonin, controls out"(光子进入,控制输出)的理念,将从摄像头图像输入到转向、油门、刹车等控制命令输出的全链路,交由单一神经网络主导完成。特斯拉在发布说明中透露,V12 用 "数百万段视频片段" 训练的神经网络,替代了原本数十万行的 C++ 代码。
这种范式转变带来了双重效应:一方面,神经网络能从海量真实数据中学习人类驾驶员的综合决策策略,自动处理大量手工编码难以覆盖的边界条件(如复杂路况下的避让优先级判断),降低了部分场景的工程复杂度;另一方面,端到端模型的 "黑箱特性" 也带来新挑战 —— 内部决策逻辑难以解释,验证覆盖需要更庞大的数据集和更严谨的测试体系。
值得注意的是,特斯拉的端到端并非 "完全抛弃模块化"。为平衡智能性与安全性,系统仍保留了驾驶员监测、碰撞预警等冗余判别模块作为 "安全阀",形成 "主网络决策 + 关键节点管控" 的混合架构,既利用了端到端学习的优势,又在安全关键点保留了可审计、可快速修补的控制逻辑。
二、功能迭代:从高速辅助到城市智能
如果说架构演进是 "内功修炼",那么功能落地就是 "外功展示"。特斯拉 FSD 通过持续的版本更新,逐步实现了从高速场景到城市复杂路况的覆盖,用户体验的提升成为技术演进的直接注脚。
1. 关键功能节点的突破
FSD 的功能演进遵循 "由简到繁、由封闭到开放" 的路径,关键节点的突破具有里程碑意义:
- 高速 NOA 奠基:作为早期核心功能,高速导航辅助驾驶(Navigate on Autopilot)实现了高速公路场景下的自动跟车、车道保持和基于导航的变道,验证了自动驾驶在结构化道路的可行性。
- 城市道路攻坚:自 2021 年 FSD Beta 推出后,特斯拉将重点转向非结构化的城市道路,逐步实现信号灯识别、无保护左转、环岛通行等复杂功能,这也是对系统决策能力的核心考验。
- Robotaxi 功能渗透:2025 年推出的 FSD V14.1 版本,首次大规模引入 Robotaxi 技术成果,新增 "到达选项"(支持车库、路边、停车场等精准停车选择)、"Sloth" 保守速度档位、紧急车辆智能让行等功能,让私家车 FSD 具备了部分自动驾驶出租车的能力。

2. 版本演进的用户体验变迁
2024 年至 2025 年是 FSD 功能迭代的加速期,多个版本的更新带来了显著的体验升级:
- V12(2024 年):城市驾驶栈全面整合进端到端网络,系统决策更接近人类驾驶员,在复杂路况下的变道时机选择、跟车距离控制等方面的智能化程度明显提升。
- V13 系列(2024 年末 - 2025 年初):聚焦实用性优化,新增 "停车启动" 功能(从 Park 状态可直接激活 FSD),同时提升了雨天、夜间等特殊环境下的感知稳定性。
- V14.1(2025 年 10 月):作为近一年来的重大更新,该版本初期仅面向搭载 HW 4.0 的车型推送 —— 因模型参数量显著增大,需更强算力保障实时性。用户反馈显示,V14.1 在复杂路口的决策效率提升 30% 以上,对施工区域、临时交通管制等边缘场景的处理能力明显改善。
在中国市场,特斯拉采取了适配本土路况的分阶段推送策略。2025 年初的 Autopilot 更新,针对性加入城市路段导航辅助、交通信号精准检测、基于导航的自动变道等功能,尽管功能成熟度和覆盖范围仍在迭代中,但已满足国内用户的核心需求。
不过,用户体验的提升仍存在边界。多位车主反馈,FSD 在常规场景下表现稳定,但在极端天气、道路标线模糊、突发交通事件等稀有边缘场景中,仍可能出现判断延迟或决策偏差。这也是特斯拉始终强调 "驾驶员需保持注意力并随时准备接管" 的核心原因。
三、现实桎梏:技术之外的多重挑战
尽管 FSD 在技术上不断突破,但从 "辅助驾驶" 到 "完全自动驾驶" 的跨越,远非单纯优化模型就能实现。技术之外,安全争议、监管压力、认知偏差等多重挑战,构成了 FSD 落地进程中的 "无形壁垒"。
1. 安全争议与监管高压
端到端模型的 "黑箱特性",让安全验证和责任划分成为难题。过去数年,特斯拉因 Autopilot/FSD 面临全球多地的安全调查与诉讼,争议焦点集中在三方面:系统宣传是否夸大能力、驾驶员注意力监测是否有效、事故中的责任如何界定。
2025 年秋季的监管动作尤为引人关注。据路透社 10 月 9 日报道,美国国家公路交通安全管理局(NHTSA)已对 288 万辆搭载 FSD 的特斯拉车辆展开调查,起因是收到 50 多份涉及交通安全违规和车祸的报告,重点关注信号灯识别错误、闯红灯、误入对向车道等问题。这种高压监管直接影响功能推广节奏 —— 部分计划推送的功能因需满足监管要求而延迟上线,欧洲市场的 FSD 测试范围扩张也因此放缓。
2. 命名悖论与用户认知偏差
FSD 的命名本身构成了一种 "认知陷阱"。"Full Self-Driving"(完全自动驾驶)的名称,极易让消费者误解为车辆可实现无人监控的自主行驶;但特斯拉同时在产品标注中强调其 "Supervised"(需要监控)的属性,这种矛盾定位引发了广泛争议。
尽管特斯拉曾发布车辆从工厂自动驾驶至交付点、短途送车等演示视频,但这些场景均处于严格受控条件下,与复杂的公共道路环境存在本质区别。现实中,部分车主因误解功能边界而放松注意力,成为安全事故的隐患,也进一步加剧了公众对自动驾驶技术的信任危机。
3. 数据与场景的覆盖瓶颈
端到端模型的性能高度依赖数据覆盖度,但 "长尾场景" 的稀缺性成为难以突破的瓶颈。常规驾驶场景的数据已相对充足,但暴雨天 + 路面施工 + 非机动车逆行、山区无标线道路等极端稀有场景,既难以通过真实车队大规模收集(存在安全风险),又难以通过仿真完全模拟(物理真实性不足)。
特斯拉虽拥有庞大的用户车队作为数据来源,但即便是数百万段视频片段,也无法覆盖所有潜在风险场景。这也是 FSD 在边缘场景中仍会出现决策失误的根本原因 —— 模型尚未 "见过" 足够多的相似案例,自然无法形成最优决策。
四、结语:在技术理想与现实落地间寻找平衡
特斯拉 FSD 的演进之路,是自动驾驶技术发展的一个缩影 —— 它生动展示了数据与算力驱动的技术爆发力,也真实暴露了这一领域面临的复杂挑战。从 HW 1.0 到 HW 4.0,从模块化到端到端,从高速辅助到城市智能,FSD 用十余年时间证明:自动驾驶的进步不是线性的技术叠加,而是硬件、软件、数据、场景的系统性进化。
但更重要的认知是:技术突破只是自动驾驶落地的必要条件,而非充分条件。FSD 的发展现状表明,真正的完全自动驾驶不仅需要更强大的神经网络模型,更需要建立起被社会广泛接受的安全标准、监管框架和责任体系。特斯拉用 "数百万段视频" 替代了 "数十万行代码",但无法用技术手段直接解决监管信任、用户认知、责任划分等非技术问题。
对当下的车主而言,将 FSD 视为 "高级辅助驾驶工具" 而非 "自动驾驶系统",严格遵守监控要求,是最理性的选择;对特斯拉而言,如何在技术宣传与用户认知间建立清晰边界,如何与监管机构协同构建安全标准,或许比单纯迭代模型版本更为关键;对整个行业而言,FSD 的每一次迭代都具有参考价值 —— 它既指明了数据驱动的技术方向,也警示着自动驾驶落地必须跨越的现实门槛。
未来几年,FSD 仍将是自动驾驶领域的 "风向标"。其演进轨迹不仅会反映技术的进步,更将记录产业、监管与社会在自动驾驶浪潮中的磨合与平衡。而这种平衡,恰恰是自动驾驶从 "实验室" 走向 "寻常路" 的关键所在。
转载请注明:可思数据 » 特斯拉自动驾驶 FSD 从辅助到端到端的演进
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com

