
发那科FANUC机器人控制机柜R-30iB维修
2025-08-16 4条评论 关键词:
发那科fanuc机器人控制机柜R-30iB维修是一项需要细致操作与系统判断的技术工作。该控制柜作为机器人系统的中枢,集成电源模块、伺服驱动、主板及I/O单元,任何部件异常都可能影...
您的位置:首页 > TAG信息列表 > 发那科
2025-08-16 4条评论 关键词:
发那科fanuc机器人控制机柜R-30iB维修是一项需要细致操作与系统判断的技术工作。该控制柜作为机器人系统的中枢,集成电源模块、伺服驱动、主板及I/O单元,任何部件异常都可能影...

2025-08-16 4条评论 关键词:
发那科fanuc机器人M-410iB作为常用的搬运机器人,定期保养维护能保持其运行稳定性,减少机械磨损和故障概率。这类机器人的保养需结合其结构特点和作业环境,注重关键部件的状态检...

2025-02-09 71条评论 关键词:
发那科工业机器人示教器上的急停按钮,以及背面的安全开关,或者控制柜上的急停按钮等开关,通常分为链1链2双通道,当两个通道不是同时断开或者同时闭合,它就会显示异常。发生异常报...

2025-01-31 63条评论 关键词:
碰撞检测报警机制,通常在机器人执行操作任务时,因遭遇意外的碰撞事件或受到外部力量的猛然冲击而被触发。此类故障不仅会使机器人暂停其既定的工作流程,无法继续正常运转,而且还...

2025-01-31 62条评论 关键词:
发那科M-1iA并联机器人维修系统故障是一个复杂而精细的过程,它涵盖了多个关键领域的检查与修复,具体包括驱动器、编码器、电机以及控制系统的全面诊断与维护。
在详细检查与...

2025-01-31 62条评论 关键词:
在处理发那科SCARA机器人维修异响问题时,为了精准地识别异响源头并采取相应的解决措施,我们可以遵循以下细致且系统的步骤:
进行细致的观察与记录:在机械手处于运行状态时,需全...

2025-01-31 64条评论 关键词:
发那科中空手腕在使用过程中,可能会遇到一系列常见故障,这些机器人故障类型具体涵盖以下几个方面:编码器故障是较为常见的一种,编码器作为中空手腕的关键组件,其作用是精确检...

2025-01-31 66条评论 关键词:
当fanuc机器人不幸遭遇碰撞或损坏时,需遵循一系列周密的维修步骤来恢复其正常运作。以下是针对此类情况所制定的详尽维修流程:故障识别的精确性至关重要。这一过程要求细致...

2025-01-31 68条评论 关键词:
当发那科机器人维修系统发出SRVO-138报警信号时,这往往意味着其内置的软件已经检测到脉冲编码器信号存在异常或错误。面对法那科机器人SRVO-138报警的情况,可以通过一系列...

2025-01-31 63条评论 关键词:
当发那科机器人维修SRVO-105报警信号灯亮起时,这往往预示着UIIMSTP信号出现了异常状况。UIIMSTP信号作为一种至关重要的紧急停止信号,其主要功能在于在面临突发紧急状况时,能够...

2025-01-31 62条评论 关键词:
发那科SR-6iA SCARA机器人控制柜维修工作涵盖了一系列复杂的方面,包括但不限于电源故障、通信故障、过载故障、过热故障以及编码器故障等多种问题。
在进行发那科SR-6iA SC...

2025-01-31 63条评论 关键词:
关于FANUC(发那科)机器人控制装置外部急停单元安全回路(急停)的连接方法,以发那科机器人维修R-30iB/R-30iB Plus控制装置(以下简称A柜),进行详细而全面的阐述。
在A柜的内部结构中,...

2025-01-31 66条评论 关键词:
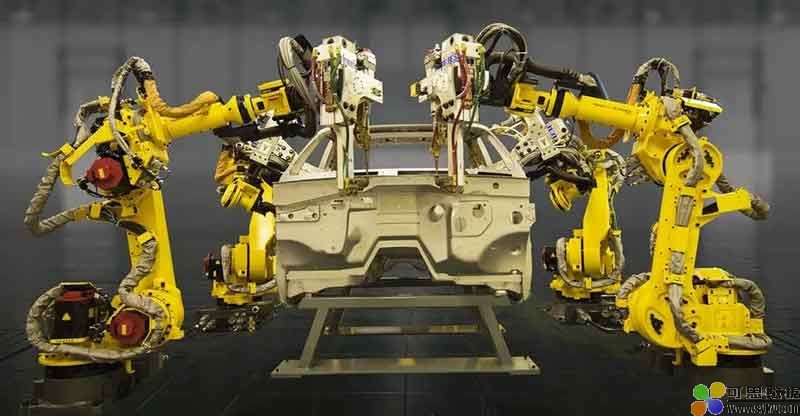
在自动化生产线的精密运作中,发那科M-410iB机器人凭借其卓越的高效性和精准度,赢得了业界的广泛赞誉。然而,即便是如此先进的高科技设备,也难以完全避免故障的发生。控制柜,作为...
2024-10-25 97条评论 关键词:
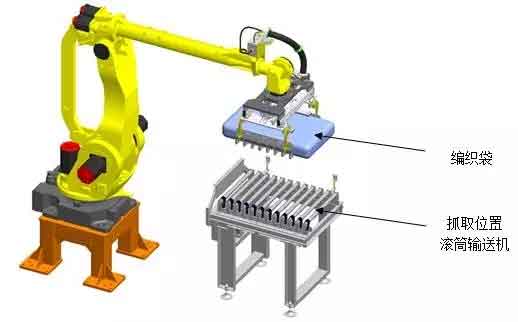
今天将由小编来为您介绍fanuc码垛机器人指令详情。(发那科机器人)一、码垛功能定义通过教导一些代表性的点,工件可以从下层到上层依次层叠。二、码垛类型码垛B:包括码垛B(单路径...
2024-10-25 98条评论 关键词:
Fanuc使用工厂的零脉冲数据将机器人恢复为零,除非机器人的零点校准结果更新。根据相关信息要求,出厂脉冲数据:fanuc机器人零点标定结果未更新怎么处理? 1.将机器人的所有关...

2024-10-25 101条评论 关键词:
那科(FANUC)机器人获取当前位置的方法通常有两种:1.通过机器人控制系统: •在FANUC机器人控制器上,可以通过编程或监控模式查询机器人的当前关节角度或笛卡尔坐标系中的位置...