集成神经网络可使机器人随意转换行走姿态
|
|
据外媒报道,由于受到外部的刺激,昆虫会在不同的步态之间快速改变,以应对不同。受此启发,现在科学家们利用集成的人工神经网络,可以达到同样的目的。这项技术最终可能会被用于性能更好的假肢。
科学家们现在创造了一个小型机器人,利用集成的人工神经网络,可以做同样的事情。这项技术最终可能会被用于性能更好的假肢。
NeuroPod运用了学名叫尖刺神经网络的东西
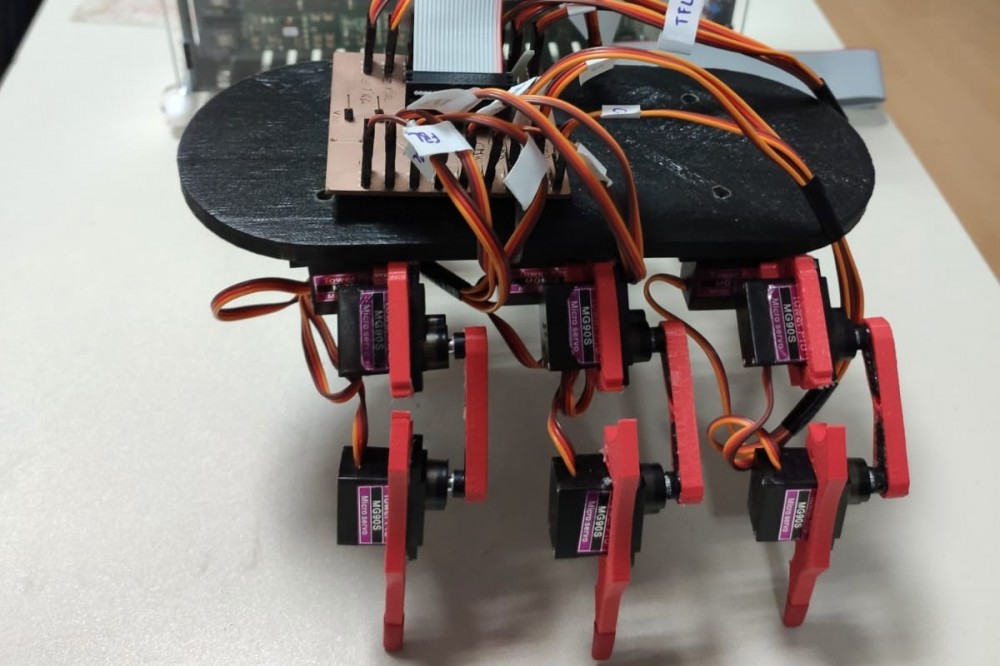
这款3D打印的六足机器人被称为NeuroPod,由西班牙的研究人员开发。它的机载微处理器包含30个人工神经元,目前,这些神经元以各种信号的形式接收来自相邻的硬线计算机的电子刺激。为了响应这些信号,这些神经元会瞬间向控制机器人腿部的18个伺服电机发出指令。
因此,只要收到信号,NeuroPod就会在行走、小跑和奔跑的步态之间平稳、瞬间切换。该团队称,其他行走机器人的情况并非如此,它们必须在处理控制命令时暂停,然后才能改变步态。而当它们改变步态时,这个过程往往是笨拙而尴尬的。
从右到左,团队成员Juan PedroDomínguez,Alejandro Linares和DanielGutiérrez
现在研究人员计划为机器人配备视觉和听觉传感器,使其能够对环境中的提示做出反应。在未来,它的人工神经网络可以被整合到诸如电动假肢等物品中,根据用户的神经冲动在不同的动作之间快速过渡。
以下视频中演示了MAS系统: |
时间:2020-04-18 00:16 来源: 转发量:次

声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。