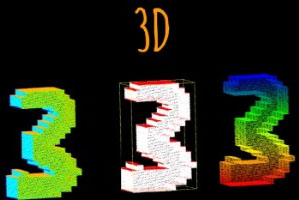
3D MNIST 数字识别数据
|
数据介绍:
该数据集的目的是提供一种简单的方法来开始3D计算机视觉问题,如3D形状识别。该数据集包含从MNIST数据集的原始图像生成的3D点云,以便为用于处理2D数据集(图像)的人员提供熟悉的3D介绍。 织梦内容管理系统 在3D_from_2D笔记本中,您可以找到用于生成数据集的代码。 本文来自织梦 您可以使用笔记本中的代码从原始数据集生成更大的3D数据集。 copyright dedecms 内容full_dataset_vectors.h5整个数据集存储为从所有3D点云的体素化(x:16,y:16,z:16)获得的4096-D向量。 dedecms.com 在原始点云的作用下,它包含带噪声的随机旋转副本。 本文来自织梦 完整数据集被拆分为数组: dedecms.com
读取完整数据集的示例python代码: dedecms.com
with h5py.File("../input/train_point_clouds.h5", "r") as hf:
X_train = hf["X_train"][:]
y_train = hf["y_train"][:]
X_test = hf["X_test"][:]
y_test = hf["y_test"][:]
train_point_clouds.h5&test_point_clouds.h55000(火车)和1000(测试)3D点云以HDF5文件格式存储。点云的平均值为零,最大维度范围为1。 copyright dedecms
每个文件分为HDF5组 copyright dedecms
每个组在原始mnist数据集中被命名为其对应的数组索引,它包含: copyright dedecms
示例python代码读取2位数并将一些组内容存储在元组中: 内容来自dedecms
with h5py.File("../input/train_point_clouds.h5", "r") as hf:
a = hf["0"]
b = hf["1"]
digit_a = (a["img"][:], a["points"][:], a.attrs["label"])
digit_b = (b["img"][:], b["points"][:], b.attrs["label"])
内容来自dedecms
voxelgrid.py简单的Python类,从3D点云生成体素网格。检查内核是否使用。 本文来自织梦 plot3D.py具有在jupyter笔记本内绘制点云和voxelgrid的功能的模块。由于Kaggle的笔记本缺乏对呈现Iframe的支持,你必须在本地运行。 织梦内容管理系统 功能包括: 织梦好,好织梦
特别声明: ¤ 此数据集库仅供研究和教育用途,不得用于任何商业用途。¤ 如果您在任何出版物或报告中使用该数据库,则必须添加引用来源。 ¤ 版权归作者及所在组织所有。 ¤ 如用于商业用途,请联系版权所有人。 ¤ 本站数据来源于网络如有侵权请联系我们。 |