激光导航移动机器人的发展与蜕
|
|
激光导航AGV是从早期电磁导航、磁带导航AGV逐步发展进化而来的。在20世纪70-80年代,随着激光技术的不断发展,激光测距的精度不断提高,人们开始尝试利用激光作为测量定位,经过长期研究,终于成功研发了二维激光扫描仪。1990年,瑞典NDC公司开发了第四代AGV控制系统,AGV才开始使用激光导引系统。
较早的反射板导航,应用较多的是SICK的NAV350和NDC系统。SICK NAV350可以直接输出传感器的位姿坐标,用户不需要编程就可以直接用于AGV的定位,开发简单、性能可靠,所以在市场上占据主导地位。同时SICK NAV系列基于反射板导航的还有NAV340、NAV245,不同的是NAV340、NAV245需要用户自己做定位算法,相对开发较难。
随着激光雷达角分辨率的提高与主控电脑的计算能力提升,基于SLAM的自然导航技术越来越普及。相对于激光反射板导航,自然导航施工简单,无需对现场环境进行改造,柔性化程度更好。这时,倍加福推出了自己的拳头产品——R2000。
R2000二维激光扫描仪采用发射器、曲面镜和接收器一体旋转的测量技术,为实现真正的同步测量打下了基础。一体旋转技术将单点测量衍生成了360 º平面内的全区域测量,可用于快至50 Hz,每秒252, 000测量值的高速二维测量,同时确保检测精确性和稳定性。R2000有HD和UHD两个版本,HD版本性价比高,是国内AGV厂商的普遍选择;UHD版本最高角分辨率可达0.014°,基于反射板的测量距离更远。因此,倍加福R2000受到了市场更多青睐。 在自然导航激光雷达的选择上,SICK推出的LMS151和LMS511也曾广泛应用于自动叉车,但由于推出时间较早、价格较高,性能相较于后来的R2000相对较差,所以被倍加福夺去了不少市场份额。后来SICK推出了LMS111,是一款紧凑型、经济型,主要用于室内外区域防撞、测量及安防的激光雷达。LMS111体积小、重量轻,可用于户外恶劣的天气环境,在众多领域得到了广泛应用。 尽管激光传感器的性能在不断提升,但是相较于传统的磁条导航、二维码导航、基于反射板的激光导航,自然导航对算法的要求相对较高,而且依靠单一的激光传感器并不能完全适应实际使用环境,尤其是复杂的使用环境中,还需要配合激光反光板、视觉传感器、超声、光电等多种传感器融合使用,才能满足现实使用需求,这便对算法层面的技术有了更高的要求。目前除了国外的NDC、ANT等公司提供算法解决方案外,国内只有仙知机器人独领风骚,在算法层面能够依据客户现场使用环境提供相应的解决方案。
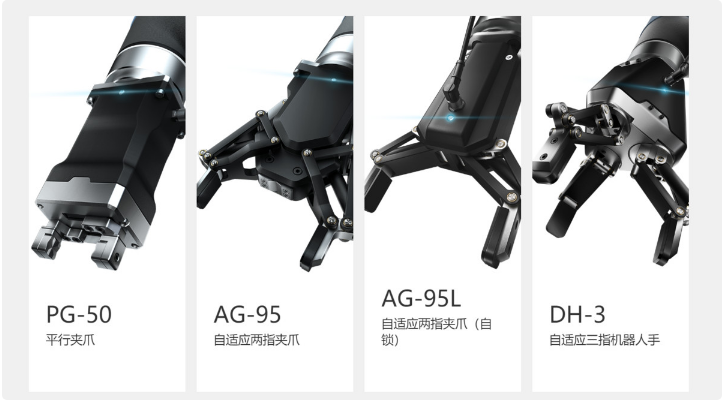
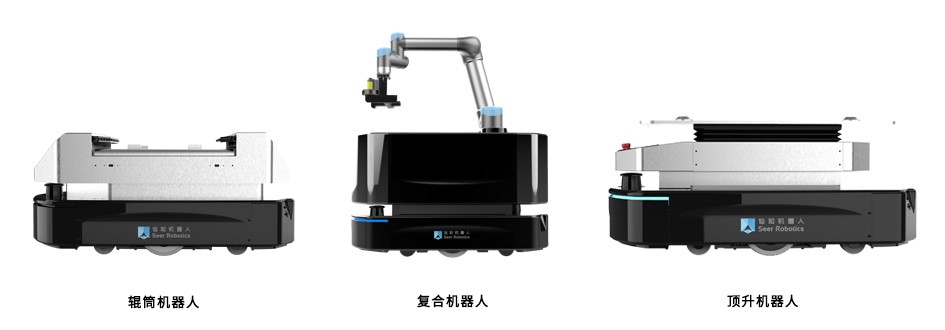
仙知机器人推出的激光导航移动机器人产品,在3D SLAM基础上结合多传感器,增强定位导航稳定性的同时,加入了对场景语义的理解,真正做到了自动化与智能化的完美融合,能够适应长廊、高动态等复杂环境,满足用户不同环境的使用需求。基于用户复杂的使用场景,仙知机器人推出了AMB系列无人搬运底盘,可根据具体使用场景,配合顶升、辊筒、机械手、牵引、皮带、云台、显示屏等进行多种扩展,满足不同行业不同场景的使用需求。
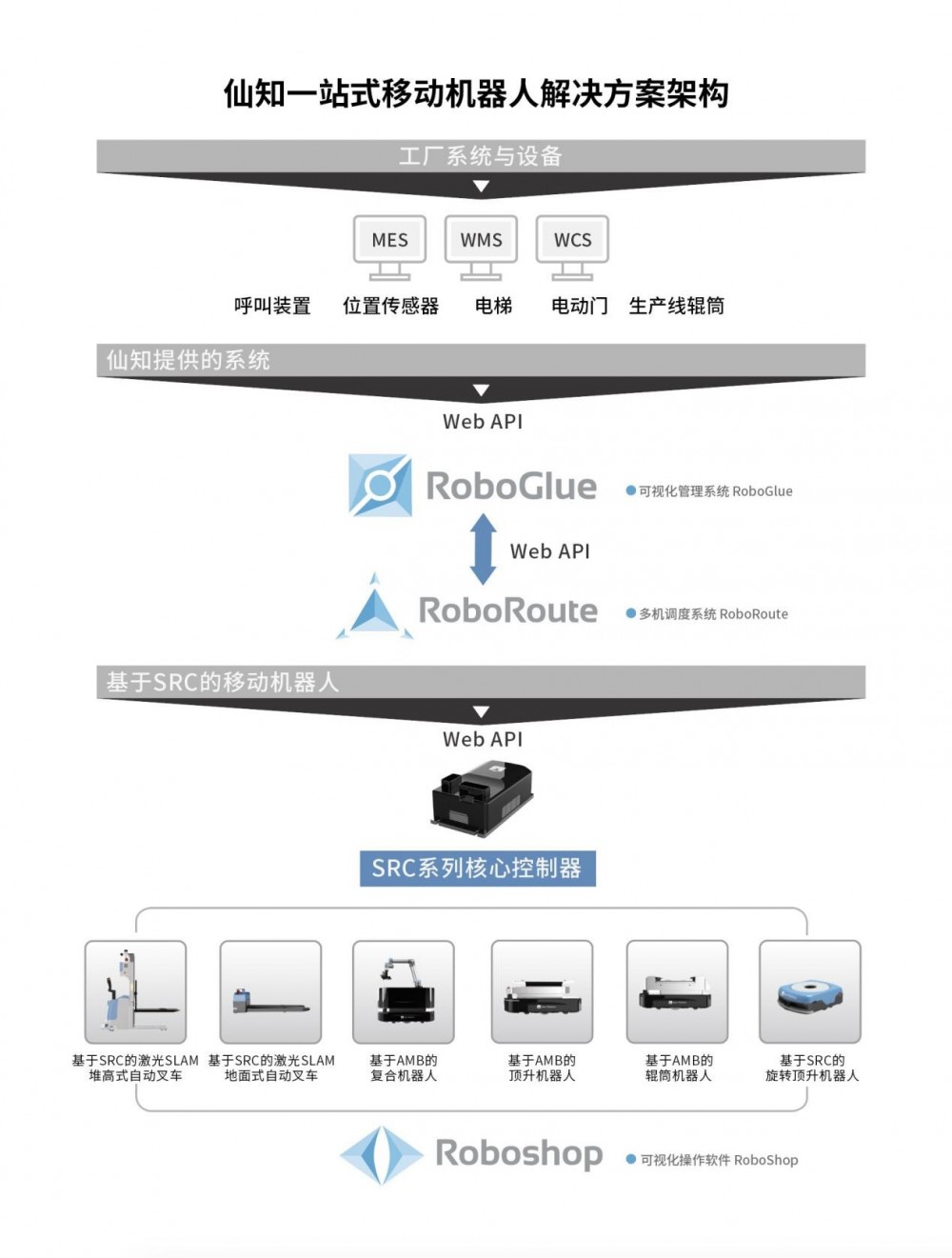
同时,仙知机器人作为一站式移动机器人方案专家,不仅为集成商合作伙伴及终端用户提供单一的移动机器人最强大脑SRC系列核心控制器和激光导航移动机器人产品,还有相匹配的、操作简便的移动机器人一站式实施工具Roboshop,多机调度系统RoboRoute与对接仓库和产线的可视化管理系统RoboGlue,形成了成套的智能物流解决方案。
仙知自主研发的移动机器人最强大脑SRC系列核心控制器,不仅算法强大,功能丰富,而且满足工业移动机器人、商用移动机器人、自动叉车的不同应用需求,适配双轮差动、单舵轮、四驱麦克纳姆轮等多种车型,受到市场的热烈追捧,成为众多集成商与移动机器人本体制造商的最佳选择。仙知机器人携手集成商为终端用户提供的解决方案已在汽车制造、3C电子制造、家电制造、半导体制造、食品烟草、电商仓储、医疗教育、商用服务等众多领域广泛应用。 在工业4.0时代全面到来与中国智能制造不断发展的当下,市场对移动机器人的灵活性、智能化要求不断提升,基于SLAM技术的激光导航移动机器人将会逐步成为市场主流。在技术层面,多传感器融合算法是未来发展必然。仙知机器人将继续加大研发投入,始终保持算法与技术的领先优势,打造更加智能的移动机器人产品,并为集成商与合作伙伴提供全方位场景化的智能物流解决方案,赋能中国智造。
|



时间:2019-08-13 00:26 来源: 转发量:次

声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。