【视点】“新物种”软体机器人的抓取革命
目前来看,传统的抓取装置主要有机械手爪、吸盘等,其中机械手爪设计周期较长、更新频率较高、利润附加值较低,且难以适用于易损、易形变物体的抓取场景。吸盘同样存在场景受限的问题,对表面不平整的物品很难抓取。
2011年,在学术界出现了“软体机器人”的概念,跟传统机器人相比,它们不靠电机来驱动,更多是靠气动力。
商业化之路
从人体角度来看,肌肉的弹性系数与橡胶硅差不多,于是业界开始尝试用软塑料类的材料来做机器人,软体机器人从而变成一种新想法。直到2012年,美国几位教授用气枪为塑胶通气,研制出能够执行爬、跳等动作的软体机器人。
有了这些前沿探索后,业界开始看到软体机器人的市场前景,用来做医疗机器人、穿戴机器人和机器人玩具等。
2013年,哈佛大学Whitesides研究小组的学者Carl Vause,从章鱼中获得灵感而发明了软体机器人,并创办了全球第一家将该技术商业化的美国企业Soft Robotics。
当传统机器人工程师正努力通过硬连杆、传感器和伺服电机来满足市场对机器人柔性抓取的需求时,Soft Robotics的技术可以说是一个大转变。
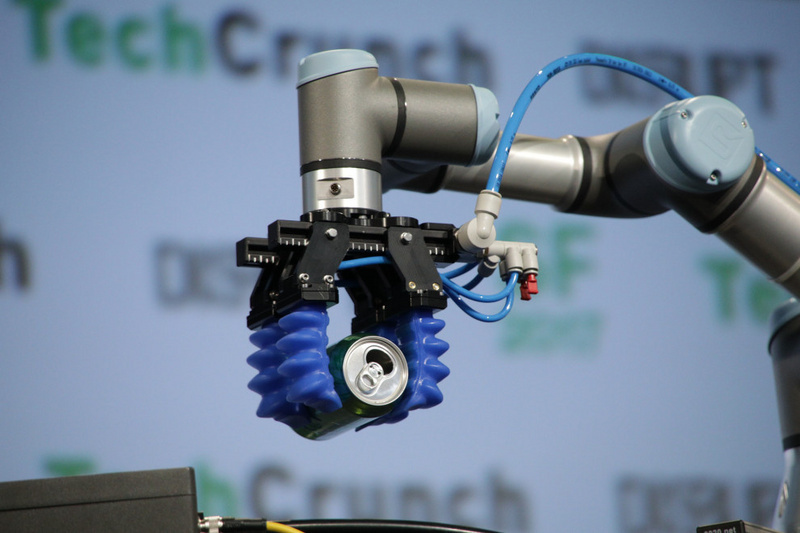
Soft Robotics CEO Vause介绍,其软体机器人完全由聚合物制成,这是一种带有微流体通道材料的专有混合物,不需要传感器或其它机电装置来操作,计算能力内置在夹爪中。当启动时,它就可以模拟章鱼的触角来实现人手的取放能力。
结合历史背景,加利福尼亚州萨利纳斯的移民劳动力减少,英国退欧对劳动力自欧盟国家流入英国,澳大利亚“背包客”劳工监管存在障碍,劳动力日益稀缺已衍生为一个全球性问题。
“这个问题对世界各地的食品成本和供应产生直接影响,因为食品加工和包装的手工程度高,劳动力成本占总成本比例高,且主要依赖低成本的移民劳动力,因此生产者趋于自动化来维持生产力。”Vause道出了首选食品领域切入市场的原因。
发展至今,不仅食品领域,农业、先进制造业、电子商务、零售业、物流业等都需要自动化来满足日益增长的市场需求和解决劳动力短缺的问题,还需要自动化技术操控形状多变和易碎的产品。Soft Robotics在这类非结构化、精密、频繁变化的应用环境中找到了用武之地。
除了Soft Robotics,在软性夹爪领域的企业还有我国的北京软体机器人(SRT)和柔触机器人。
SRT CEO高少龙说,团队从最早的科研构想阶段实验室就开始考虑市场应用,即用于异形和易损物品的搬运环节,协助解决柔性生产的问题。因此,最早期的目标市场是食品和生鲜,后来逐渐拓展到3C、玻璃制品等,应用在手机屏幕、边框、电路板、汽车软包电池、电脑外壳等抓取场景。
柔触机器人CEO张帆则认为,产品的良率和一致性主要与生产工艺相关,在汽车和半导体行业沉淀了多年的单机和整线设计经验,对B端客户需求拥有较深了解后,柔触通过集成商切入人力密集型、自动化程度不高的行业,如物流、玩具、食品包装、3C电子、汽车零部件、服装纺织等。
“低门槛”是个误解
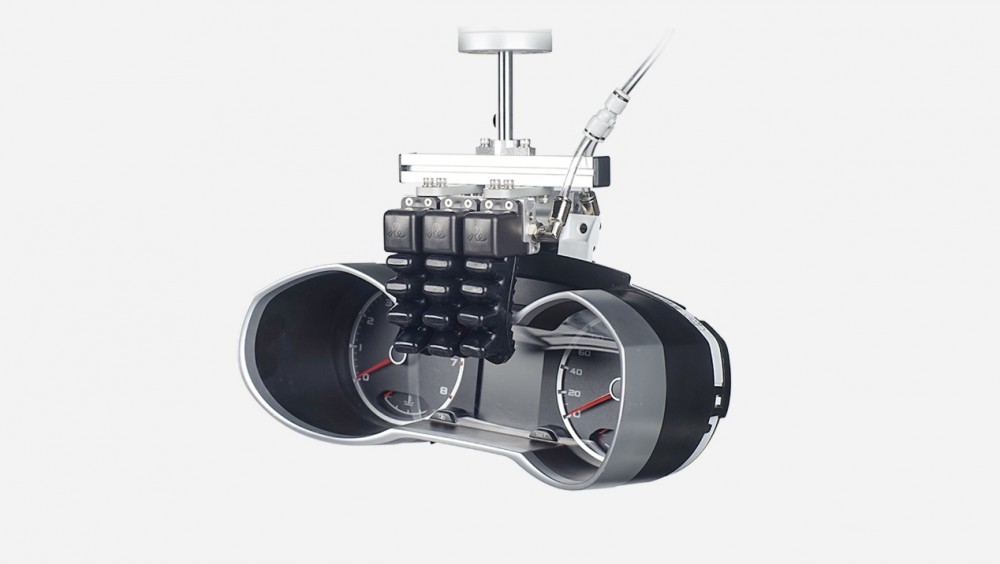
关于软体手的工作原理,较常见的驱动方式为气动驱动,它决定了软体手各单元内部呈封闭的腔体结构。当正压驱动时,软体手各单元打开,夹爪握紧进行抓取;当负压驱动时,软体手各单元收缩,夹爪松开释放物体。

张帆表示:“有些人觉得柔性手爪的技术比较好理解,所以很简单。其实壁垒包含各方面,这是一个结合材料,到结构设计,再到生产工艺,以及电气控制原理的交叉学科。”
“如果客户需要的是一个行业的解决方案,那就需要对客户所处行业的工艺,比如节拍、定位精度、批次数量、理料方式等有充分了解。”张帆从产线设计角度指出,要把产品做好,设计出能为客户创造价值的解决方案,并不简单。
为了应对产线柔性以及产品质检能力的提升,柔触除了提供完整的手爪套件和针对精密行业的“柔喙”系列产品,也推出了包括30多种单手指的模块化设计平型组合套件。
而在高少龙看来,最大的壁垒则是“材料和结构的优化”,他说道:“据我们所知,不少东莞小厂都仿制过,但是都失败了。”
高少龙进一步指出:“硅胶材料需要调质,不同配方对应不同制造工艺。内部结构设计则包括壁厚、内腔结构等,不同的结构也会带来不同的工艺和使用性能。”
“有点类似铸件的概念,看着原理都不难,但是涉及的技术内容较多,高品质的铸件企业也很少。相比铸件企业,柔性体更难质检,如果技术不过关,会频繁出故障,这就不只是良品率的问题了。”高少龙强调。
值得一提的是,夹爪产品与设备一次性销售不同,因其“耗材”的特性,客户会持续购买。
“吸盘的寿命多为10万数量级,换算成实际概念就是,吸盘最少只能使用3-5天,最多也仅能使用一个月左右的时间。”高少龙表示,根据产线生产节拍不同,SRT产品的寿命可以达到300-600万次,即使用2个月至1年。对于厂商来说,延长检修周期就意味着更长的生产时间与更高的设备使用效率。
为了提升产品寿命,柔触机器人对基础材料进行了改良,在高分子基体材料中加入了纳米添加剂,旨在提升现有柔性材料的拉伸强度和耐磨性。
香港大学机器人研究院院长王煜教授对软体机器人技术壁垒的描述为:从原理、设计、结构、驱动、控制、传感,做成一个完整的体系。
王煜教授进一步分析,软体机器人面临着三大基础问题:
第一,如何定义软体机器人系统。刚体运动学通过机械原理可以解决运动问题,而软体相关运动理论至今仍属空白;
第二,如何设计/控制柔性系统。软体机器人具有无穷多自由度,在无法用铰链和传感的前提下,如何让软体机器人产生运动,并实现更复杂的控制是个难点;
第三,柔性系统制造的材料问题。目前3D打印可以把不同性能的材料混合起来以获得较复杂的柔性系统,虽说可以抓苹果、鸡蛋、豆腐等,但在抓起物体快速移动时会发生抖动,缺乏刚性。此外,气体驱动、液体驱动和压电驱动实际效果欠佳,驱动材料依然是很大的瓶颈。
除了生产上的技术壁垒外,Soft Robotics设计出无需人工干预,也不需要增加训练、线下学习、抓取物品的3D模型,以突破应用壁垒。
Vause认为,传统机器人被设计为非常有效地执行单个任务,但是当物品或任务发生变化时,它们需要传感器和复杂的视觉系统来重新整合和编程,这也许就需要花费数百小时和大量资金投入。
Soft Robotics利用材料科学和AI算法,设计并构建了自动化解决方案和软体机器人夹持系统,不需要传感器或其他机电设备进行操作,让客户已有的机器人实现即插即用,并能灵活操控形状、大小和重量各不相同的物体及易损物体。
如今,Soft Robotics的SuperPick系统能够每小时进行600多次的抓取。如果抓取失败,使用一个基于浏览器的界面就可以人工遥控监视。在2018年CES活动上,Vause演示了如何纠正一个远在2700英里以外机器人的抓取错误。
“世界上没有机器人市场”
虽说夹爪是一个较前沿且实用的研究领域,但国内却鲜有企业专门对其进行研发生产。“高品质柔性抓手的研发和生产难度较高,再加上这个市场暂时处于蓝海阶段,因此市面上可看到的产品并不多。”高少龙表示。
他说:“如果我们今天去做个平板,其实不那么复杂,我们可以先参照苹果小米、华为的优缺点。但做软体机器人,市面上基本没有可参照的产品形态和方向,唯有与客户在应用中一点点琢磨出来。”
张帆表示同意:“现在柔性手爪是一个新事物,一方面我们在教育客户,另一方面我们也在被客户教育。教育客户是指,我们需要推广产品,介绍产品的优势;被客户教育是指,客户提出的具体需求也是我们产品升级和迭代的方向。”
王煜教授也认为,软体机器人要越来越多,在解决小问题上多多少少有进展后,这些成功案例和经验能够慢慢融合,促进软体机器人的理论发展。
软体机器人有很多大学和科研机构在研究,事实上仍存在泡沫化的风险。“一项创新技术如果找不到应用场景,就无法进入商业化运营,那耗时耗资的研发就没有太大意义,甚至会让行业进入低谷期,减少产出,学者也会转移他们的学术兴趣。”高少龙指出。
以Vause的话来说:“世界上没有机器人市场,只有正好可以通过机器人技术解决问题的市场。”机器人和机器人技术必须解决未被满足的需求,才能实现应用。当产学研将重心从只需要机器人承担的工作转移到人机协作上,当把柔性机器人夹取系统与机器学习相结合时,也许就会发生一系列令人惊奇的事情。

时间:2018-11-15 23:27 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















