混沌物理学方法将研究人员引向机器人的昆虫般
为了能够让微型机器人走出像昆虫一样的步态,日本和意大利的研究人员正在拥抱混沌和非线性物理学,并配有运动控制器以提供脑机接口。生物和物理学被根本上基于非线性物理学的普遍现象所渗透,这激发了研究人员的工作。
该小组在AIP Publishing的《Chaos》一书中描述了使用Rössler系统(一个包含三个非线性微分方程的系统)作为中央模式发生器(CPG)来控制机器人昆虫步态的基础。
日本东京理工大学和特伦托大学的Ludovico Minati表示:“潜在现象的普遍性证明,通过Rössler系统的基本组合可以实现运动,这是混沌系统历史的基石。”
与同步有关的现象使小组可以创建非常简单的网络,从而生成复杂的节奏模式。
他说:“这些网络,即CPG,是自然界各处进行有腿运动的基础。”
物理学始于微小的变化
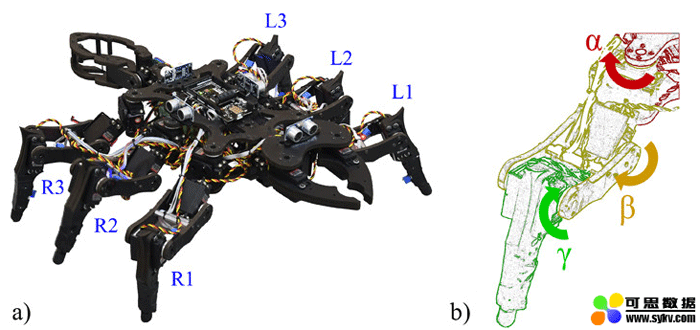
研究人员从一个简约的网络开始,每个实例都与一条腿相关联。更改步态或创建新步态,只需对耦合和相关的延迟进行少量更改即可完成。
换句话说,可以通过使单个系统或整个网络更加混乱来增加不规则性。对于非线性系统,输出的变化与输入的变化不成比例。
这项工作表明,Rössler系统除了具有许多有趣而复杂的特性外,“还可以成功地用作构建昆虫机器人的生物启发运动控制器的基础,” Minati说。
通过人机界面启用控制
他们的控制器内置有脑电图,可启用脑机接口。
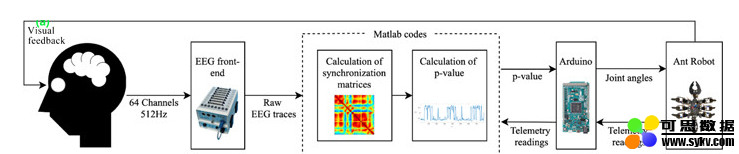
用于实时EEG控制实验的实验设置和数据流。资料来源:美国物理研究所
Minati说:“记录了人的神经电活动,并使用相位同步的非线性概念来提取模式。” “然后将这种模式用作影响Rössler系统动力学的基础,该系统为昆虫机器人生成行走模式。”
研究人员两次利用非线性动力学的基本思想。
他说:“首先,我们用它们来解码生物活性,然后以相反的方向产生生物启发的活性。”
Minati说:“这项工作的关键意义在于,它“展示了非线性动力学概念的普遍性,例如Rössler系统的能力,通常在抽象场景中对其进行研究,但此处将其用作生物学产生的基础”。合理的模式。”

时间:2020-12-21 22:09 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















