柔软机械手的设计灵感竟然来源于扁豆?仅需很

科学家在设计机器人时通常会从自然中寻找线索,有些机器人模仿人的手,而另一些机器人则模仿章鱼爪或植物的行为。现在,美国佐治亚大学工程学院的研究人员设计了一种新型软机器人抓手,该抓手从一种不寻常的来源中汲取了灵感:扁豆。
扁豆和其他缠绕类植物使用触敏芽将自己像绳子和棒子一样缠绕在支撑物上以向上生长时,UGA团队的机器人目标旨在牢固而轻柔地抓住直径小于1毫米的物体。
“我们曾尝试过不同的设计,但对结果感到不满意,然后我想起了几年前我在花园里种植的扁豆,”该研究的主要作者,副教授霍伯(Mable Fok)说。“这种植物可以紧紧地抓住其他植物或绳索。因此,我对缠绕植物进行了一些研究,认为这是一种自然届的设计,可供我们探索。”
柔软的机械手仅需很小的空间
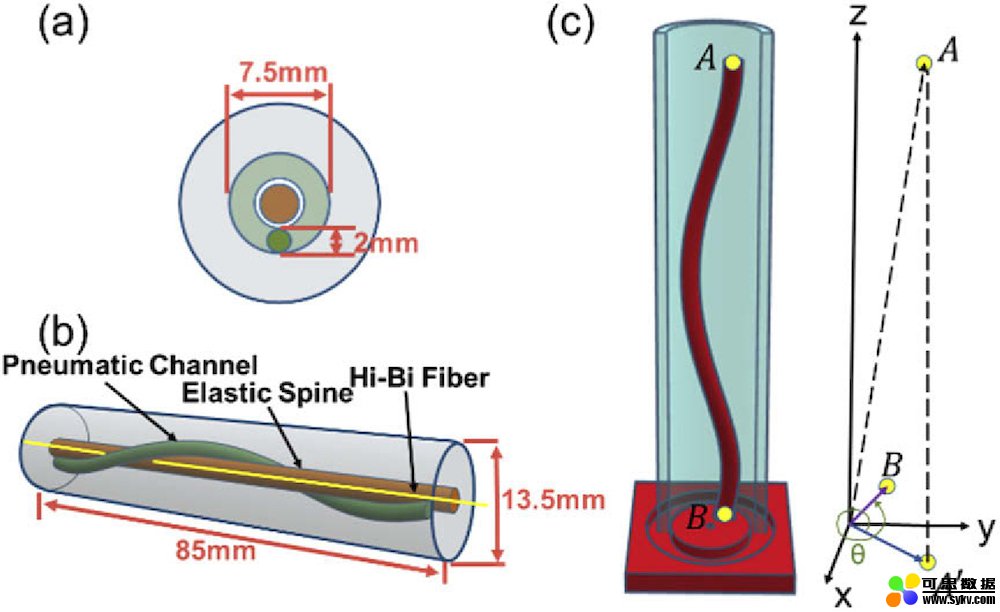
Fok表示:“我们的机器人的缠绕动作只需要一个气动控制装置,无需多个气动控制装置之间的复杂协调,从而大大简化了其操作。” “由于我们使用独特的缠绕运动,因此柔软的机械手在狭窄的区域也能很好地工作,并且只需要很小的操作空间。”
与许多现有机器人相比,UGA设备提供了另一项进步:嵌入式传感器可提供关键的实时反馈。
“我们在机器人的弹性脊柱中部嵌入了一个光纤传感器,该传感器可以感知缠绕角度,目标的物理参数以及任何可能导致目标松动的外部干扰,” Fok说。
研究人员认为,这种柔软的机器人抓手可以在包括农业、医学和研究在内的许多环境中使用。应用程序可能包括选择和包装需要柔软触感的农产品,例如植物和花卉、外科手术机器人,或者在实验过程中选择并将研究样品保存在易碎的玻璃管中。
柔软的机械手精确度高
在他们的研究中,研究小组说,螺旋形夹爪被证明可以有效地夹住铅笔和画笔等物体,甚至可以像拉直的回形针的细线一样小。该设备还具有出色的可重复性,较高的缠绕感应精度和精确的外部干扰检测能力。
该团队计划继续致力于基于光纤传感器的读数来改进自动反馈控制。他们还希望探索小型化设计,以作为生物医学机器人的基础。
“这种缠绕式软机器人及其嵌入式光纤传感器构成了更全面的软机器人的基础。拥有更简单的设计和控制绝对是优势,”Fok说。

时间:2020-12-17 23:25 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















