机器人点位批量在不同坐标系下的转化
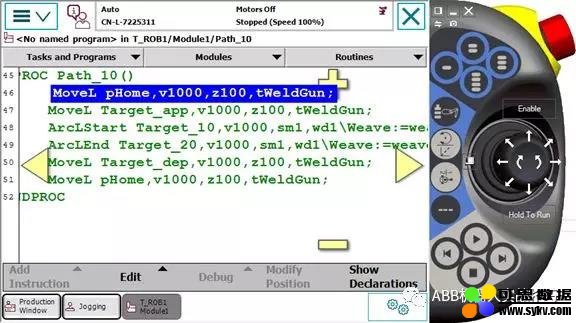
1)建程序的时候,所有点均在wobj0坐标系下(wobj0坐标系也可不写),如下图
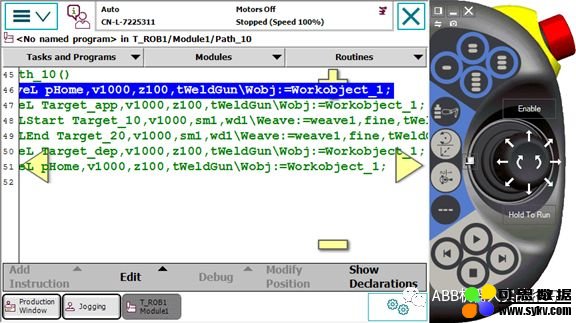
2)如果现在对工件做了工件坐标系,想把上述点转化到工件坐标系,并且批量修改所有运动指令,使得指令后自动带上对应的工件坐标系,如下图,如何实现?
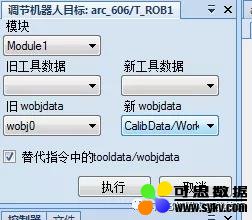
3)打开robotstudio,RAPIDtab下的调节机器人目标

4)选择模块,旧wobjdata和新wobjdata,如果勾选替代指令中的tooldata/wobjdata,则会把运动指令里对应的wobjdata更换,如果不勾选,只重算点
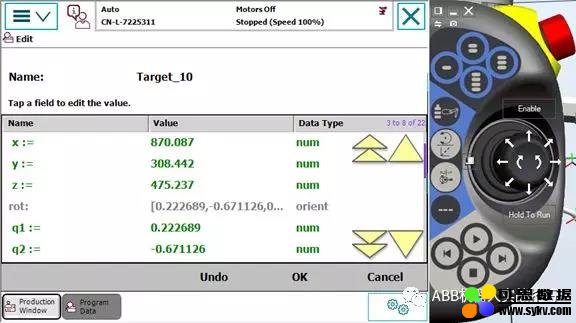
5)执行后,可以查看对应点位数据,发生变化
上图为在wobj0下
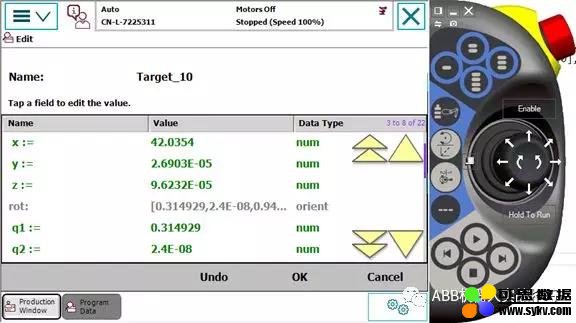
上图为workobject_1下

时间:2020-10-17 23:06 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章















