UR+伙伴在工博会的抢眼表现
(UR+SCHUNK)
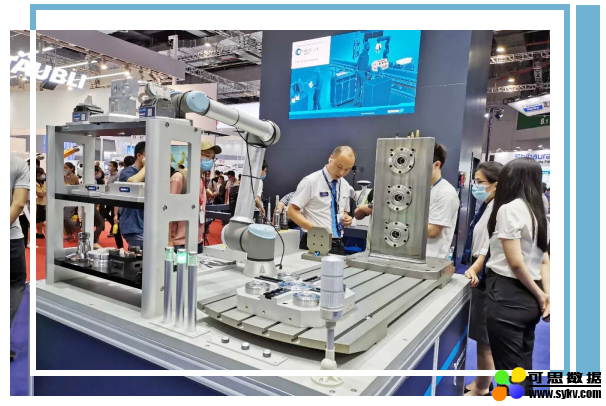
优傲机器人多家UR+合作伙伴汇聚2020年中国国际工业博览会,展示多种UR+解决方案,为制造商提供更多自动化流程新灵感。
UR+解决方案
UR+解决方案集成业内大型生态系统和协作机器人专业技术,为用户提供强大的外围设备和应用套件。UR+平台产品都经UR认证,可与UR的协作机器人无缝集成。
(UR+SCHMALZ)
优傲机器人大中华区总经理苏璧凯(Adam Sobieski)表示:“一直以来,优傲机器人积极聆听客户反馈,致力于打造更加易于使用的协作机器人。凭借UR+生态系统,UR的客户不再需要额外耗费精力去选择协作机器人的外围设备。他们能够一站式获取所需的大部分组件/套件,更快地实现自动化部署和投资回报。”
工博会于9月15日至19日在上海国家会展中心举行。在今年的工博会上,UR+合作伙伴现场演示制造业中常见的3种应用场景:螺丝锁缚、打磨、抛光及精加工和识别、分拣及上下料的集成解决方案。

应用场景
01
螺丝锁缚
(UR+OnRobot)
协作机器人可以持续地准确执行上螺丝、上螺母、零件组装、插入等重复性作业。不仅极小偏差,更减少了重复性工作所带来的伤害。UR机械手臂的重复性精度为 +/- 0.03毫米,这也是UR机械手臂成为自动化快速精确处理的理想选择原因所在。
对于螺钉特定的应用,UR协作机器人末端关节可实现自由旋转。OnRobot Screwdriver是一整套开箱即用的螺杆驱动系统,且自带螺杆送料器。只需将Screwdriver安装在UR机械手臂上,然后在UR协作机器人用户界面输入螺杆长度和扭矩值,就能使其快速投入到螺钉固定应用中,是多流程自动化螺丝紧固的理想解决方案。

应用场景
02
打磨、抛光及精加工
(UR+ATI)
打磨、抛光和精加工是制造业中一项非常基础的重复性工序,因工作环境恶劣、劳动强度大而面临着“招工难”的困境。UR协作机器人内置力控模式,可以自动灵活地调整位置以获得所需的力度,即使在弯曲和不平坦的表面上,也可以确保抛光和磨光效果一致。
UR+的新晋成员AOV-10浮动偏心振动砂光机,适用于机器人表面处理和抛光,即使是表面接触非常轻的打磨任务也能精确完成。此次工博会中,UR协作机器人将现场演示使用ATI最新偏心浮动振动砂光机完成木工件的曲面打磨。
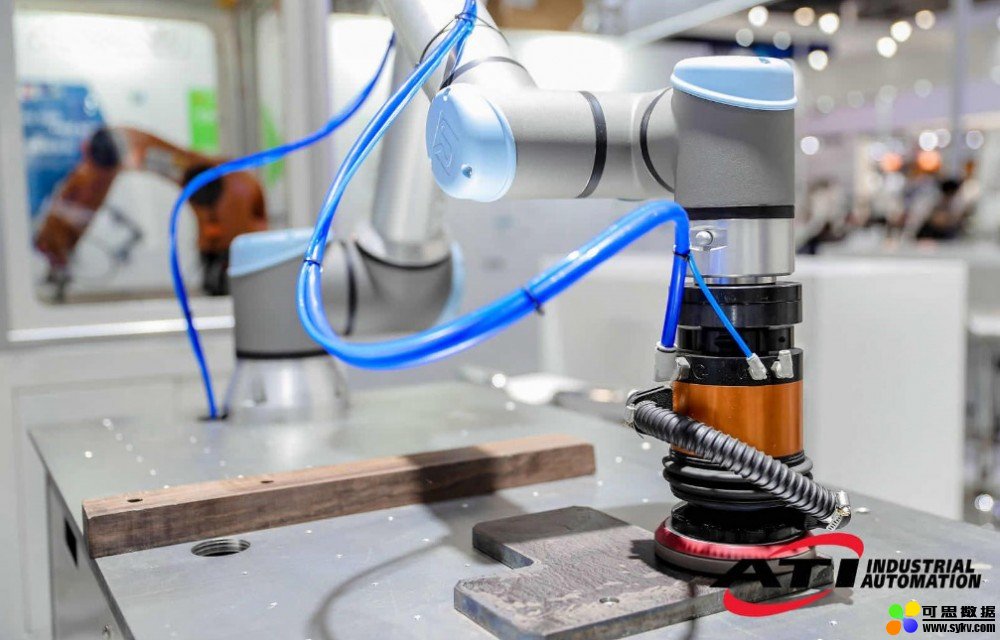
(UR协作机器人材料去除工作站)
UR协作机器人配合HEX传感器,即插即用,可减少80%的部署时间,其高精度传感技术,能够对高难度的抛光、磨砂及修边等任务进行精准控制。UR协作机器人将在现场演示打磨轮胎钢圈这一任务,只需要简单的编程,就能让复杂的抛光任务变得流畅,显著降低需时,提高生产效率。

应用场景
03
识别、分拣及上下料
协作机器人可以简化物料搬运、分拣、上下料和装箱操作,将工人从单一枯燥且繁重的工作中解放出来。再通过UR+平台集成创新夹具及视觉,即使在非结构化环境中,UR协作机器人也能识别、拾取各种物体,部署于复杂度更高的自动化生产流程中。且UR协作机器人易于编程,用户更可以通过其示教器快速部署新任务,非常适合小批量应用以及高重复性任务。

(MiRGo解决方案)
移动式的自动物料抓手不仅优化内部物流和生产流程,还能完成高精度、高难度的专业化任务。UR协作机器人配合MiR自主移动机器人,在抓取货物后,通过激光扫描技术和3D相机识别周围环境,安全避开障碍物和工作人员,选择最优路径抵达目的地,并将货物自动卸放在指定位置。
VISOR® Robotic是一款为机器人应用打造的视觉传感器,搭配UR协作机器人可快速实现相机与机器人坐标的2D或3D位置数据通讯,并提供多种较准方案。再配合夹具或工艺末端执行器,可完成多种任务应用:物体识别、抓取于放置,定位引导以及自动螺丝拧紧。
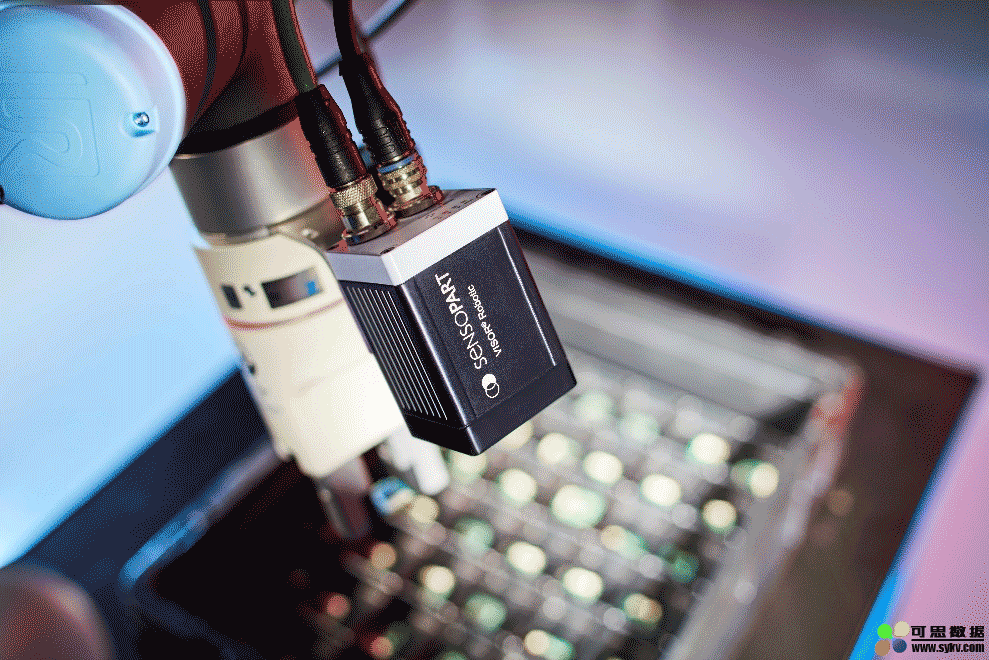
(UR协作机器人搭配VISOR® Robotic)
UR协作机器人配合Gecko SP以及OnRobot Eyes,可以让机器人能够“看到”和“感受”到它所抓取的物体,轻松完成识别、分拣与取放任务。通过快速更OnRobot的换柔软夹持器,结合优傲协作机器人独特的力度控制,柔性抓取的任务也能被轻松完成。

(UR协作机器人搭配VISOR® Robotic)
苏璧凯补充到:“UR+使自动化变得更轻而易举,各种已获验证、即插即用的组件和应用程序,进一步扩宽了UR协作机器人的应用可能性,更好地帮助不同规模的企业提高生产力、以应对瞬息万变的市场挑战。”
(UR+矽景科技)
(UR+SENSOPART)

时间:2020-09-25 23:45 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















