细胞大小机器人闪亮登场,有望通过血管进行手
近日,外国最新一期的杂志写到这样一篇报道,康奈尔大学研究人员创造出了首个含半导体元件的行走微型四脚机器人,尺寸小于0.1mm,相当于人头发的宽度都不到,还可以通过激光控制其腿部行走,这么神奇的小东西,让我们来了解一下吧!
这种微型机器人大约有 5 微米厚(1 微米是一米的百万分之一)、40 微米宽、40 到 70 微米长,可由标准光刻工艺制造而成,并能够进行大规模生产,一个 4 英寸的硅片可同时制造约 100 万个这种机器人。

每个机器人都由一个硅光电板制成的简单电路组成,其基本功能类似于躯干和大脑,还有四个电化学驱动器构成了机器人的腿。研究人员以不同光伏闪烁激光脉冲来控制这些机器人移动,每一个脉冲可以给一只腿充电,通过在光电板前后切换激光来控制机器人行走。
它们在低电压(200 毫伏)和低功率(10 毫微瓦)条件下就可移动。虽然体形微小但十分结实,在未来,这些微型机器人或许可以穿梭在人体组织和血液中,执行外科医生的操作,缝合血管,探测人类大脑等。
本研究的第一作者、康奈尔大学纳米科学 Kavli 研究所 Miskin 表示,“控制一个微型机器人就如同控制一个缩小版的你,它们可以带我们进入各种各样的微型世界。”

数以千计的机器人“大军”
一个机器人走过显微镜载玻片

一个微型机器人绕圈行走
通过生产微型化电子器件来制造细胞大小的机器人一直是人们追求的目标。
早在 1959 年,诺贝尔奖得主 Richard Feynman 就表示:“让外科医生进入身体内部(即制造一个可以通过血管进行手术的微型机器人)将会十分有趣。”
这个对于未来医疗的美好愿景凸显了将纳米级微型机器人部署到微观世界的重要性。然而,这一想法谈何容易。
首先,在液体中控制微型机器人的移动十分具有挑战性,因为在液体中强大的阻力使得微型机器人无法保持动力,因此该技术一直受到限制,十几年来科学家一直致力于开发在液体中行进的微米级驱动器。
庆幸的是,Miskin 及其同事采用一些策略来克服制造微型机器人的技术挑战,通过利用太阳能电池开发出了一款微型驱动器,成功克服了这个问题。
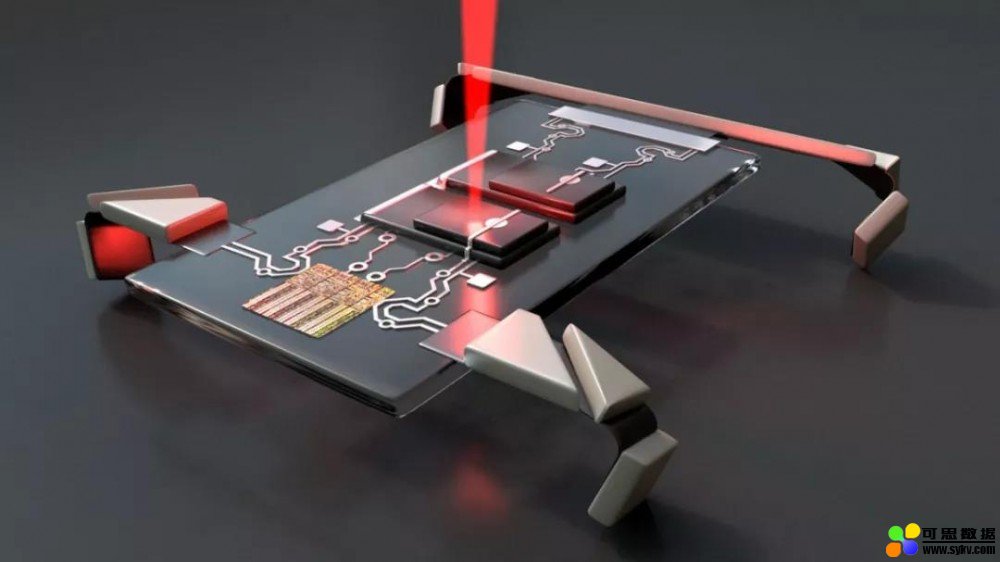
当激光照射到光电板上时,机器人就能行走(来源:康奈尔大学)
这些驱动器构成了机器人的腿,它可以将能量转换为动力。当给予该装置极少量的电流时,它就会折叠和展开。电流可使周围溶液中的离子吸附到驱动器表面,改变机器人腿上的力,从而使腿弯曲。
然后,研究人员将这些机器人腿部与中央底盘上的几块太阳能电池相连。当研究人员使用激光照射这些太阳能电池时,微型机器人的腿就可以弯曲和伸直。当研究人员使用激光在机器人前腿和后腿交替照射时,就可以推动机器人移动。
值得注意的是,这些微型机器人的尺寸小于 0.1 毫米,一块 4 英寸的硅片可同时制造超过 100 万个行走微型机器人。该团队表示,这是目前已知的第一个尺寸小于 0.1 毫米的机器人,激光用于控制驱动。
由于它们是由高度稳定的材料制成的,所以很坚固,能在高酸性环境和超过 200-k 的温度变化中生存下来。
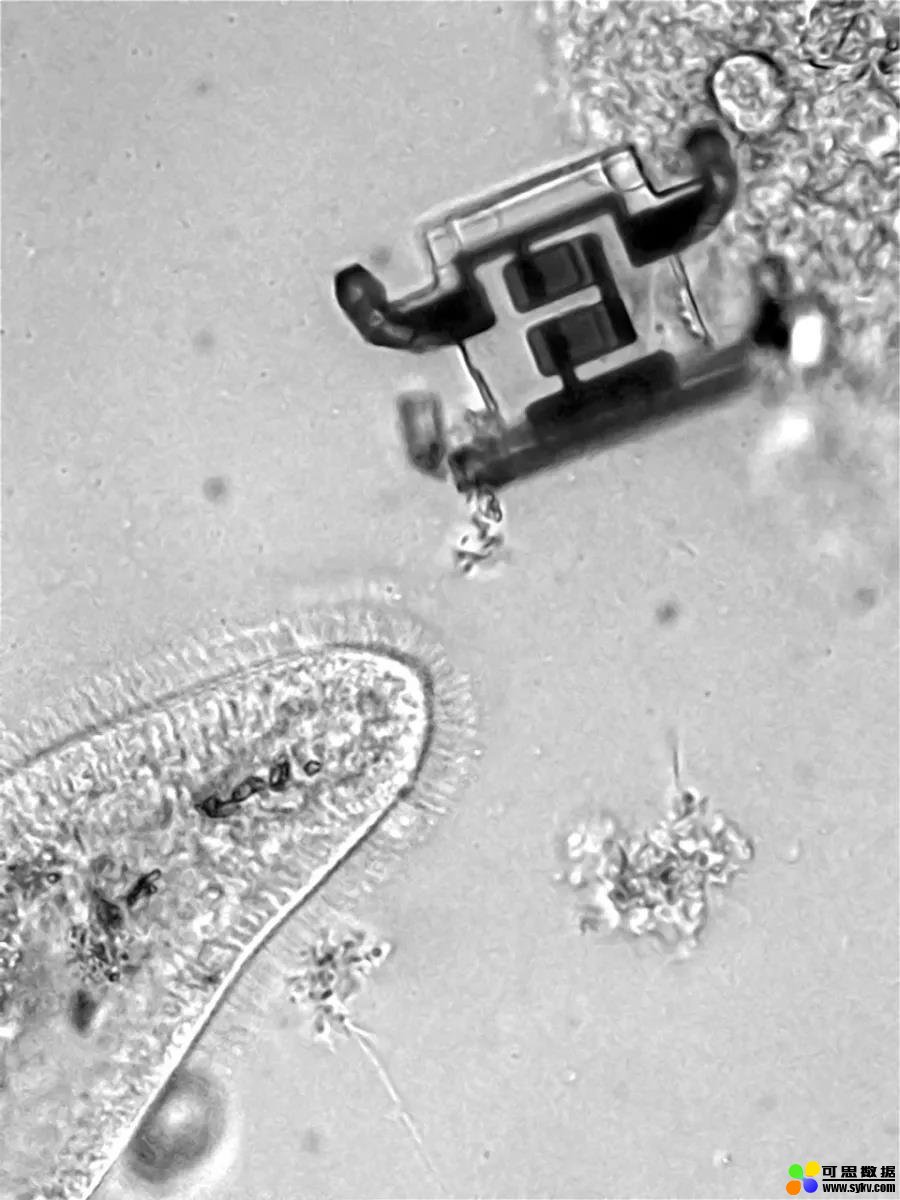
这些机器人和草履虫等微生物差不多大(来源:康奈尔大学)
此外,微型机器人能够被移液器和注射器安全吸入,并像化学物质一样通过皮下针头注射,由于它们体型微小,因而可以通过最小型号的皮下注射针头,并且在注射后也可维持机械功能,这样一个微型机器人为探索生物内环境带来了可能。
研究人员还将这个微型机器人称为“牵线木偶”,因为操作员可以通过激光照射机器人底盘上的太阳能电池来提供指令。而它主要的缺点也在于,这些机器人必须始终与它们的能力和信息源“拴在一起”。
不过,目前这些微型机器人功能仍有限,它们不能自动行走,移动速度比大多数游泳机器人慢,且不能感知环境,缺乏磁引导微型机器人的控制。
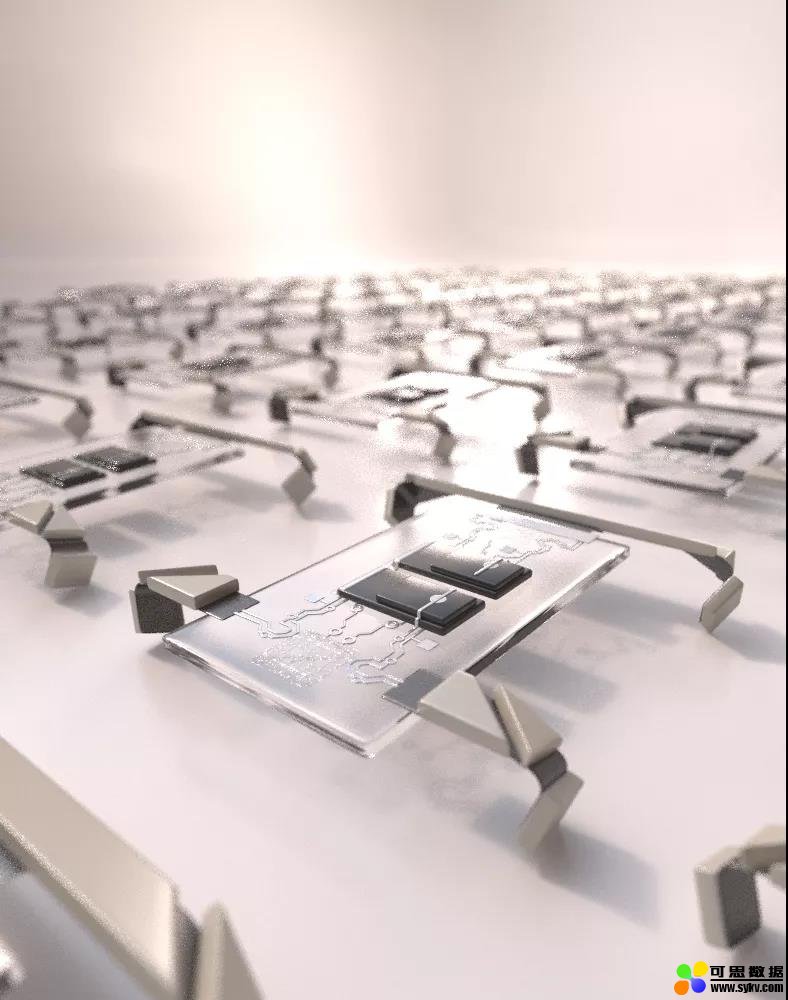
一组微型机器人“队列”
尽管如此,这些微型机器人仍然具有巨大潜力,它们能与标准的 CMOS 处理兼容。研究人员目前正在探索使用更复杂的电子装置和计算方法来改进机器人。
在未来,这种微型机器人不仅能在液体中移动,还可以使用车载传感器和逻辑电路输入更高级的指令,执行更加复杂的操作,这将使我们离 Feynman 的设想更进一步。

时间:2020-08-30 00:14 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















