德国人对研究仿生机器人”走火入魔“,造出动
德国Festo(费斯托)对仿生机器人的研究可以说是走火入魔了,一研究就是二十六年,活生生造出了一个动物世界,世人对此都表示十分惊讶。
仿生机械,顾名思义就是模仿生物的形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械。
费斯托致力于仿生技术的研发,不仅是为了发掘自然的奥妙,更是为了借助仿生技术载体实现与自动机器人的协作,为未来的全新技术提供动力。这一干就是26年了。可以说给我们带了一个仿生的动物世界。
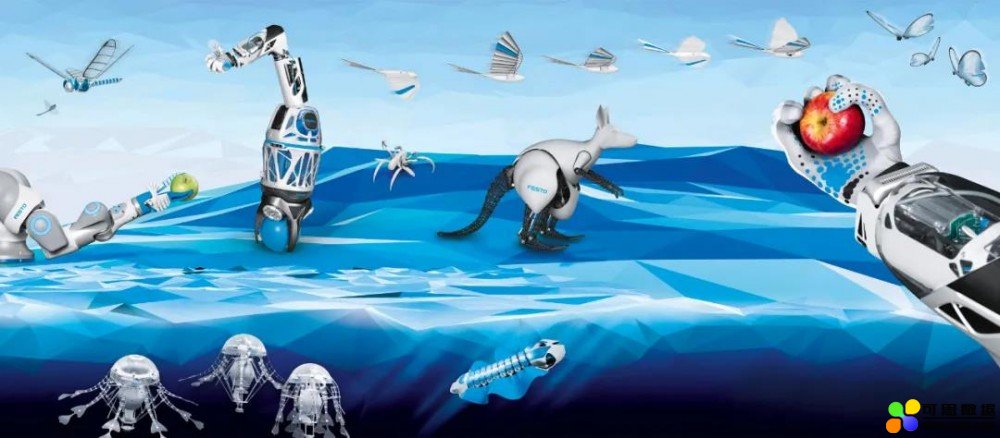
从最新的这个家族的合影中我们发现了有两处小变化,也正是今天咱们给大家展示的费斯托的最新两个仿生机器人。
接下来将一一揭秘!
01
仿生雨燕
首先我们看一下BionicSwift仿生雨燕
仿生雨燕无需人工操控,便能完全协调地成群自主飞行。通过带超宽带技术(UWB)的室内无线GPS,仿生雨燕在障碍物视觉接触中断时,也能进行精确的识别位置。
仿生雨燕身长44.5cm,翼展68cm,重量只有42g,能灵活地在空域内以协调的方式自主控制飞行。
羽片采用超轻量化、高弹性、高强度的发泡材料,一根碳纤维翎羽管连接手翼和臂翼,相比之前的扑翼飞行器有着更好的飞行运动曲线。

在向上飞行时,每片羽毛会向外张开,让气流穿过翅膀,减少功耗。在向下飞行时,羽片向内收紧,增加BionicSwift的飞行力。

身上集成了紧凑的机械系统和电机,通过智能交互精确调节振翅的频率以及各种机动飞行的升降舵。

通过和之前咱们分享的蝙蝠机器人—BionicFlyingFox相比看一下,BionicFlyingFox的运动由多个不同型号的电机控制,并采用机械耦合的形式结合在一起。
较大的无刷直流电机可以控制机器人翅膀的拍打动作,小型电机们分别调节翅膀的每个关节,来达到控制飞行高度与方向的目的。

BionicFlyingFox通过集成机载电子板与一个外置运动追踪系统的相互配合,超轻型飞行物能够在特定空间内进行半自主飞行,而仿生雨燕可以自主飞行了。
而2011年推出的Smartbird智能飞鸟,明显看起来简单太多了。

02
移动机器人
BionicMobileAssistant(移动机器人)便应运而生。它可在三维空间内独立移动,识别物体、自适应抓取,并与人类进行合作。
之前分享过第一代气动机械手是下面这个样子,拇指和食指中还装有旋转模型,使这两个手指可横向移动。通过这一设计,仿生机械手总共可实现12个自由度:
此次的DynaArm机械臂和BionicSoftHand 2.0真实复现了人类手掌的精巧运动,手指的弹性波纹管实现了气动抓手的轻量化、自适应、敏感性及强力性。

相比第一代,它的拇指和食指灵巧动作大大扩展且更为稳定。在指尖、掌内及外层带有触觉力传感器,手腕内部带有深度相机视觉检测,从而根据特定物体来调整抓取力。

DynaArm有4个自由度,有效载荷为8千克,但整个机械臂自身的重量不到8千克。其中电动机、齿轮箱、电动机控制电子装置、传感器等电动机组件都仅重1千克。在手臂末端,BionicSoftHand 2.0是气动的,并包裹在具有113个嵌入式触觉传感器的织物中。
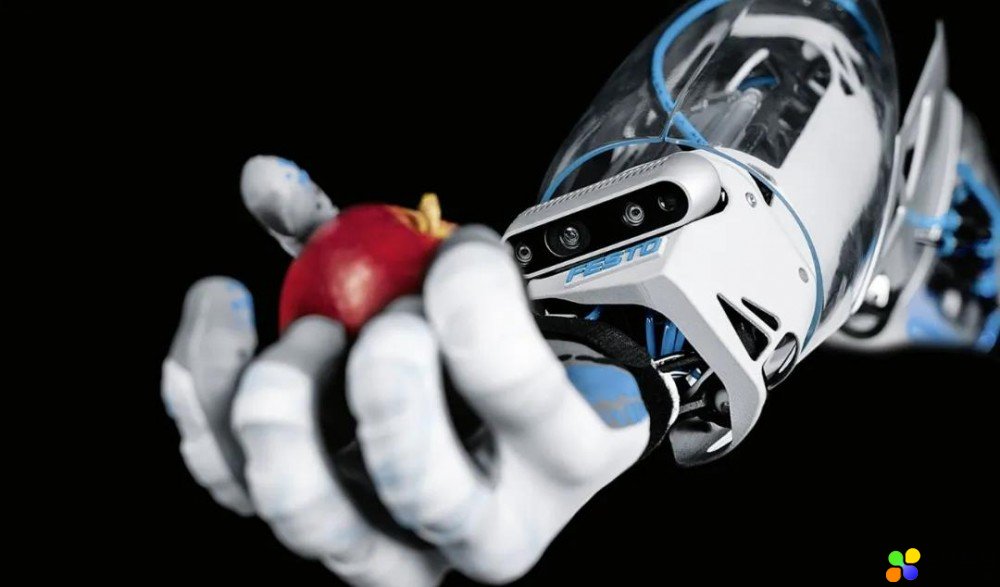
第一代时只能在手中滚个魔方。
而这次摘苹果、抓苹果,甚至发围脖、给女孩送鲜花都能做到了。
未来的世界会是什么模样真的不敢想,但她一定属于致力于研究的开发者。。。

时间:2020-08-30 00:04 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















