ABB机器人报错代码:关机时操纵器崩溃和机器人
3.14 关机时操纵器崩溃
描述
在Motors ON 活动时操纵器能够正常工作,但在Motors OFF 活动时,它会因为自身
的重量而损毁。
与每台电机集成的制动闸不能承受操纵臂的重量。
后果
该故障可能在该区域工作的人员造成严重的伤害或者造成死亡,或者对操纵器和/或周
围的设备造成严重的损坏。
可能的原因
该症状可能由以下原因引起(各种原因按概率的顺序列出):
• 有故障的制动器。
• 制动器的电源故障。
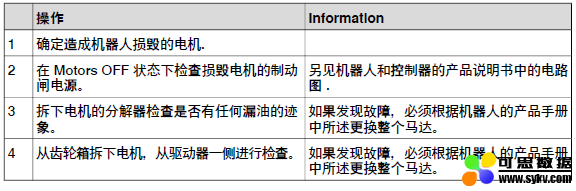
建议的操作
建议执行以下操作(按概率列出):
3.15 机器人制动闸释放问题
描述
在开始机器人操作或者微动控制机器人时,必须松开内部制动闸以允许移动.
后果
如果没有松开制动闸,机器人不能移动,并且会发生许多错误记录信息。
可能的原因
该症状可能由以下原因引起(各种原因按概率的顺序列出):
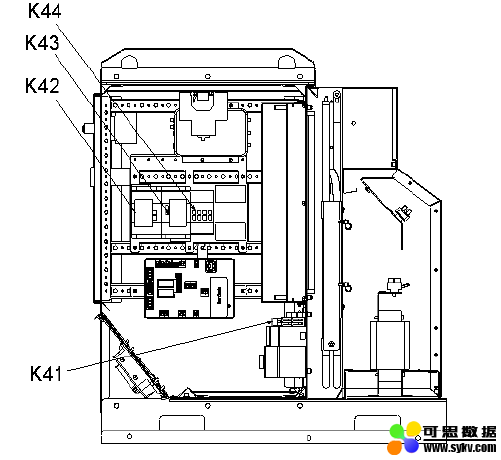
• 制动器接触器(K44) 没有正确工作。
• 系统未正确进入Motors ON 状态。
• 机器人轴上的制动闸发生故障。
• 24V BRAKE 电源电压掉电。
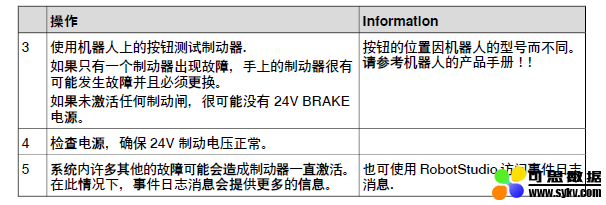
建议的操作
此节详细说明在机器人制动闸未释放时如何继续操作.

精选内容专享

时间:2020-08-26 11:19 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章















