ABB机器人报错代码:更新固件故障和不一致的路
3.10 更新固件故障
描述
在更新固件时,自动过程可能会失败。
后果
自动更新过程被中断并且系统停止。
可能的原因
这个故障经常在硬件和软件之间不兼容时发生。
后果
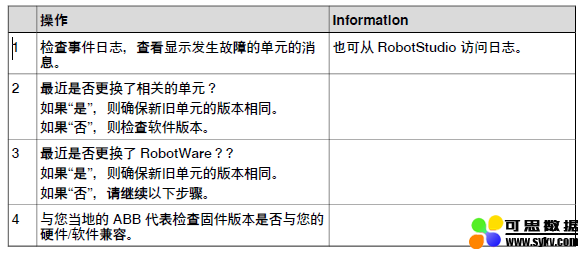
建议执行以下操作(按概率列出):
3.11 不一致的路径精确性
描述
机器人TCP 的路径不一致。它经常变化,并且有时会伴有轴承、变速箱或其他位置发
出的噪音。
后果
无法进行生产。
可能的原因
该症状可能由以下原因引起(各种原因按概率的顺序列出):
• 机器人没有正确校准。
• 未正确定义机器人TCP。
• 平行杠被损坏(仅适用装有平行杆的机器人)。
• 在电机和齿轮之间的机械接头损坏。它通常会使出现故障的电机发出噪音。
• 轴承损坏或破损(尤其如果耦合路径不一致并且一个或多个轴承发出滴答声或
磨擦噪声时)。
• 将错误类型的机器人连接到控制器。
• 制动闸未正确松开。
建议的操作
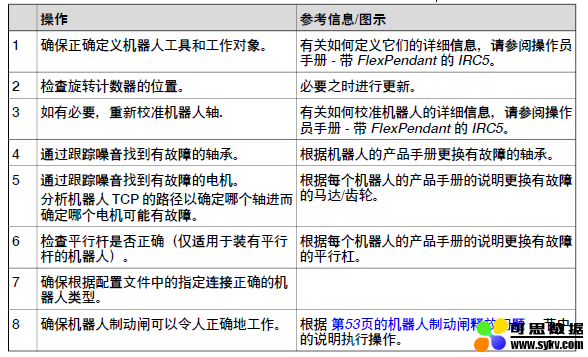
要矫正该症状,建议采用下面的操作(按概率顺序列出操作):
精选内容专享

时间:2020-08-26 11:18 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章















