简易机械手的西门子PLC控制实例讲解
今天,小编给大家介绍一个西门子PLC入门级应用实例——简易机械手的控制。
下面进入正题:
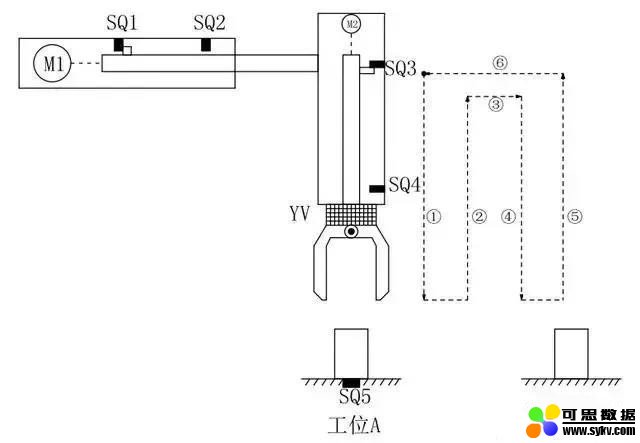
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
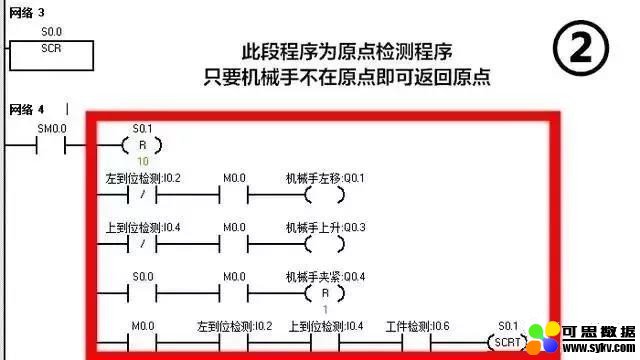
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
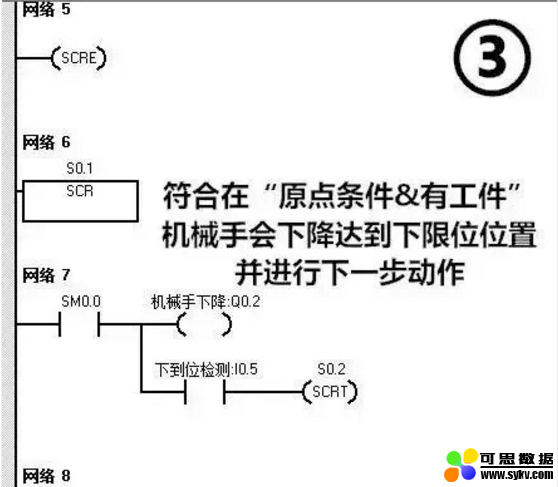
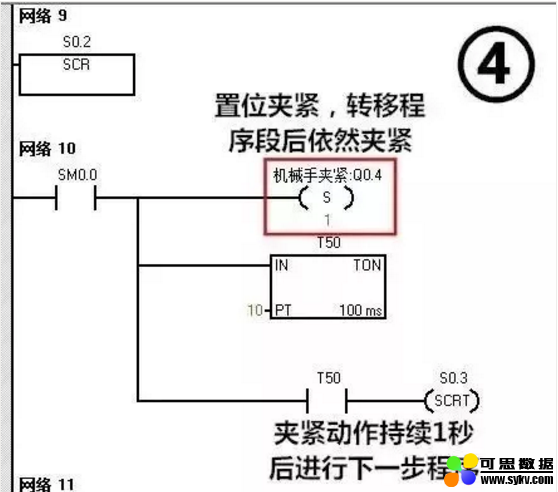
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
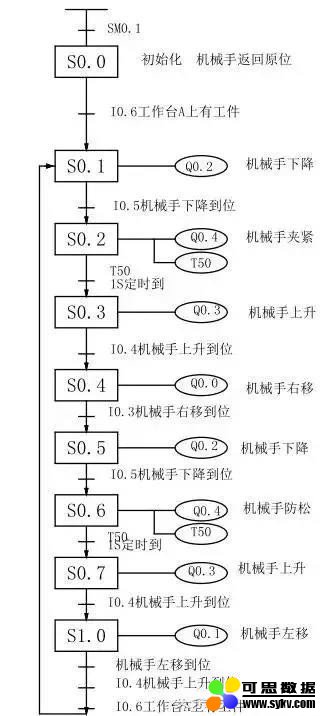
如下图所示:
编程前理顺动作如何转移:
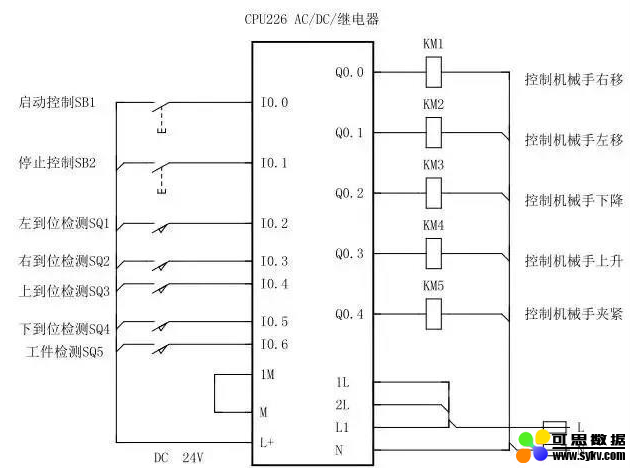
定义符号表:

硬件的接线图:
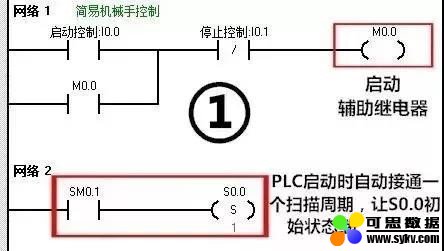
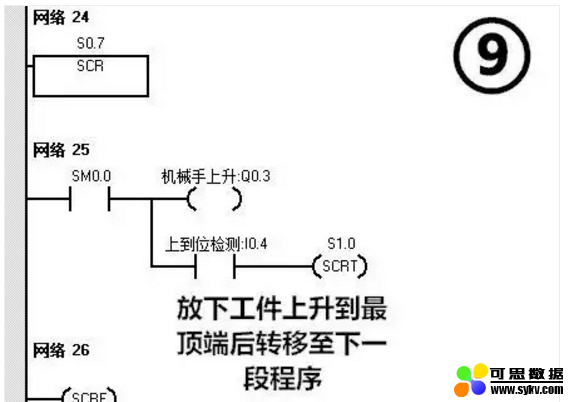
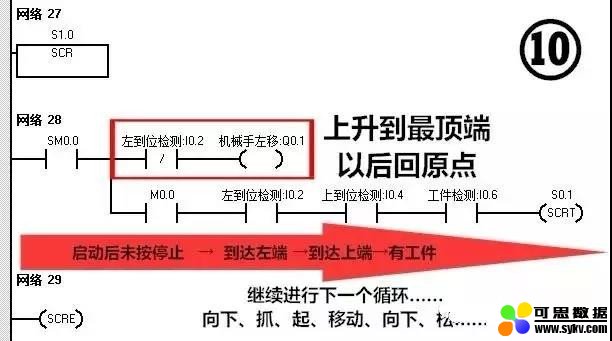
满足所有动作的程序如下:

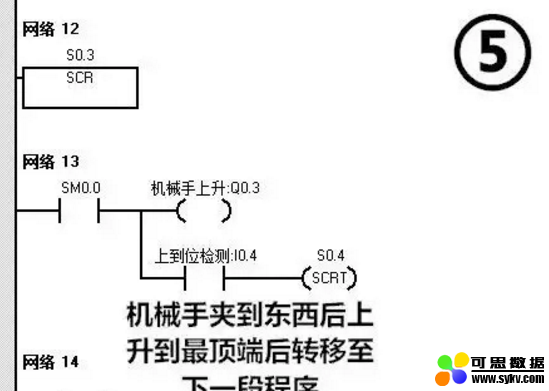
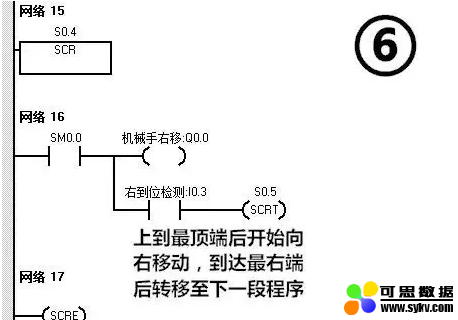
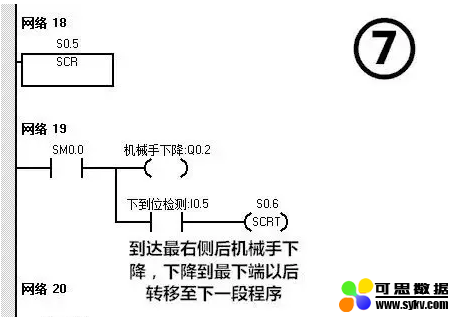
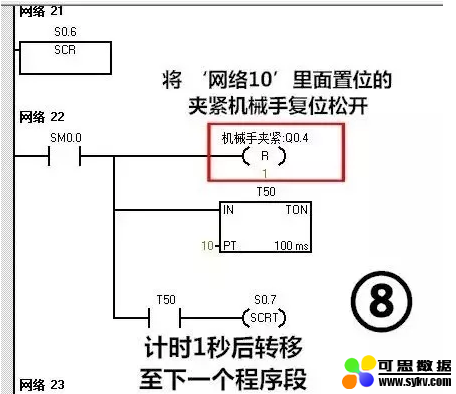
下面我们一段一段分析这个机械手是如何工作的:

时间:2020-08-12 00:01 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章















