密歇根大学研发加热型折叠式微型机器人
折叠技术和原理,非常受科学家们欢迎,在今年早些时候,哈佛的研究人员研发了以折纸技术为灵感的可编程气球方案,现在密歇根大学的研究人员,也开发出一种可折叠微型机器人的原型。据悉,该机器人能够被折叠成不同的形状,然后通过加热来应对不同的任务。
因体积小巧,这类机器需要创新的动力与驱动解决方案,否则只能执行相对有限的任务。不过密歇根大学的研究团队,希望通过新颖的设计来克服这方面的问题。
Flexible, adaptable micro-robots inspired by origami(via)
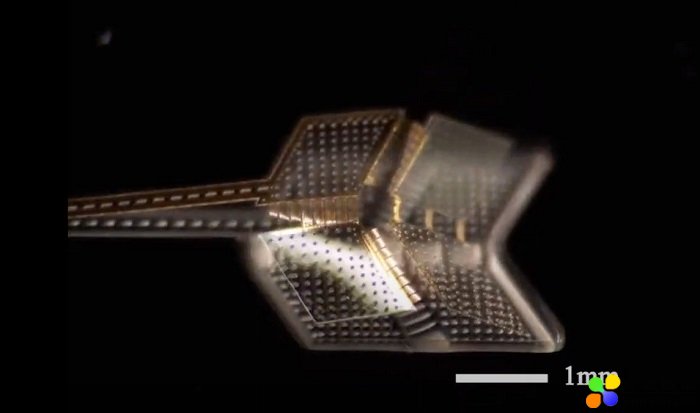
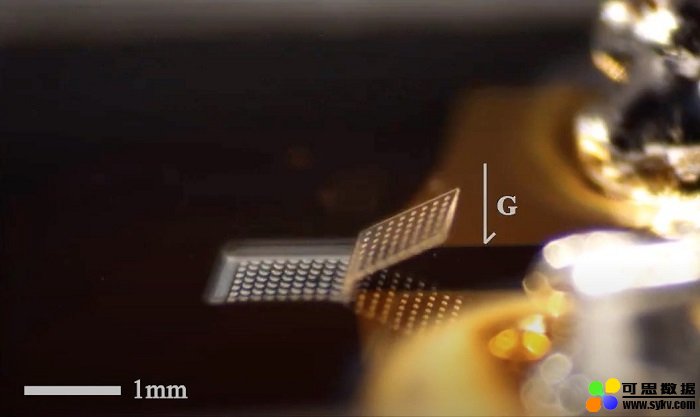
据悉,这种微型机器人的尺寸不超过 1 厘米(0.4 英寸),具有一个可折叠的金层、以及一块可充当板载执行器的聚合物折叠层。在电源和微控制器的作用下,电流可调节物料的温度,进而决定机器人最终的形状。
研究作者 Evgueni Filipo 表示:“电流会在通过金层时产生热量,然后系统可借助热量来控制微型机器人的运动”。
在通过加热来驱使初始的折叠后,可通过冷却使其展开。而当需要需要固定时,可使系统过热,以对折页进行编程(即改变它的位置)。
这种控制方法使得微型机器人可以形成一种形状,以执行某项特定的任务。然后再经过处理,以形成另一种形状、并用于执行截然不同的另一项任务。
即便如此,这种微型机器人仍具有体积小巧、功能日益强大、可用于各种工作的潜力。比如通过杀菌来净水,或者在人体内畅通无阻地输送药物。
有关这项研究的详情,已经发表在近日出版的《先进功能材料》(Advanced Functional Materials)期刊上。原标题为《Elastically and Plastically Foldable Electrothermal Micro‐Origami for Controllable and Rapid Shape Morphing》。

时间:2020-08-04 00:34 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















