Delta机器人技术情报分析-国外篇(二)
Delta机器人技术情报分析-国外篇(一)
本期技术情报主要从技术层面分析发那科、ABB机器人涉及的Delta机器人相关技术。
1、技术功效分析
技术功效分析是进行技术分析的常用手段,分析过程中需要对每项专利进行技术手段和技术效果进行标引(也就是对每项专利打标签),借助数据统计,分析出专利布局的重点,当然,布局的重点很大可能是核心的技术。
➤ ABB
对ABB的相关专利进行技术手段和技术效果的标引:
得到如下所示的技术功效图,其中,横轴表示技术手段,纵轴表示技术效果(不含外观):
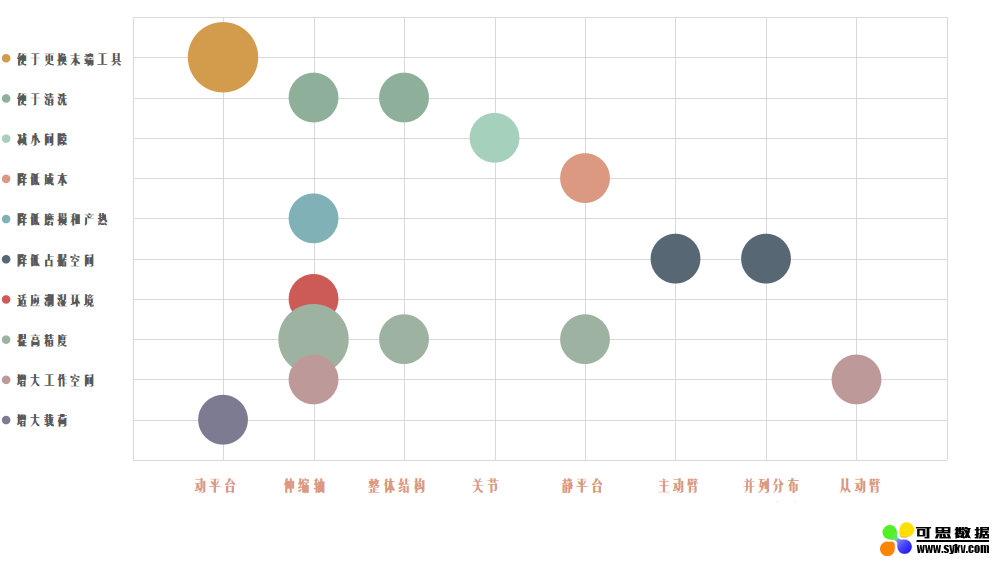
整体来看,ABB专利中的技术方案欲达到的技术效果涉及便于更换末端工具、便于清洗、减小间隙、降低成本、降低磨损和产热、降低占据空间、适应潮湿环境、提高精度、增大工作空间、增大载荷;
从技术手段上来说,ABB在伸缩轴的改进上布局有较多专利,伸缩轴的改进分别涉及便于清洗、降低磨损和产热、适应潮湿环境、提高精度、增大工作空间;其次是动平台和静平台的改进;
从技术效果上来说,涉及提高精度的改进最多,主要的技术手段包括伸缩轴、整体结构和静平台;涉及其他方面的技术效果的专利数量相差不大。
➤ FANUC
对FANUC的相关专利进行技术手段和技术效果的标引:
得到如下所示的技术功效图,其中,横轴表示技术手段,纵轴表示技术效果(不含外观):
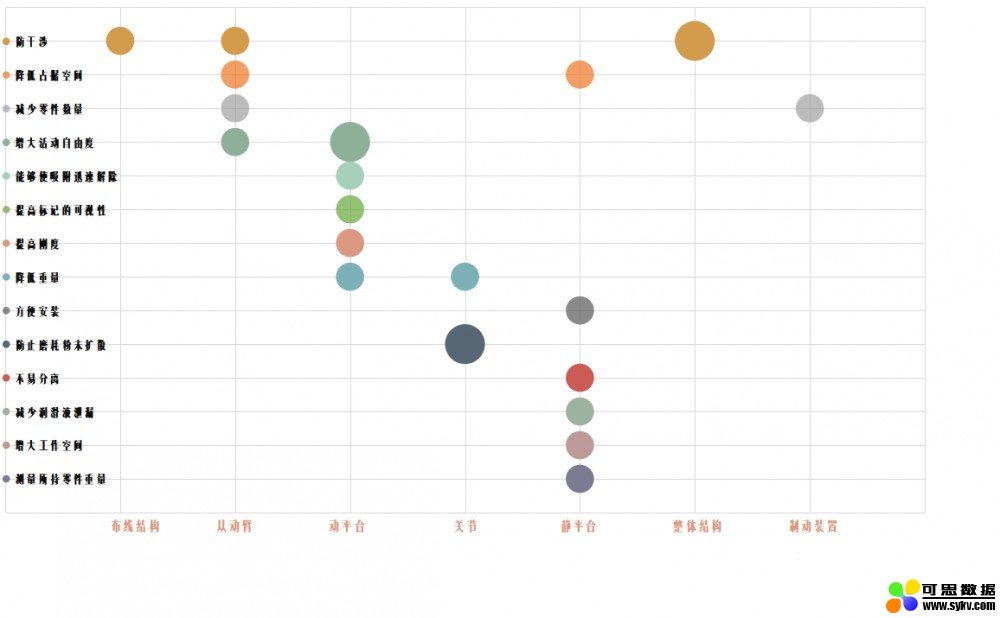
整体来看,FANUC专利中的技术方案欲达到的技术效果涉及防干涉、降低占据空间、减少零件数量、增大活动自由度、能够使吸附迅速解除、提高标记的可视性、提高刚度、降低重量、方便安装、防止磨耗粉末扩散、不易分离、减少润滑液泄漏、增大工作空间、测量所持零件重量;
从技术手段上来说,FANUC在动平台的改进上布局有较多专利,动平台的改进分别涉及能够使吸附迅速解除、提高标记的可视性、提高刚度、降低重量、增大活动自由度;
从技术效果上来说,涉及防止干涉的改进最多,主要的技术手段包括布线结构的改进、从动臂的改进和整体结构的改进;其次是,增大活动自由度方面,主要的技术手段包括从动臂和动平台的改进。
2、技术路线分析
➤ ABB
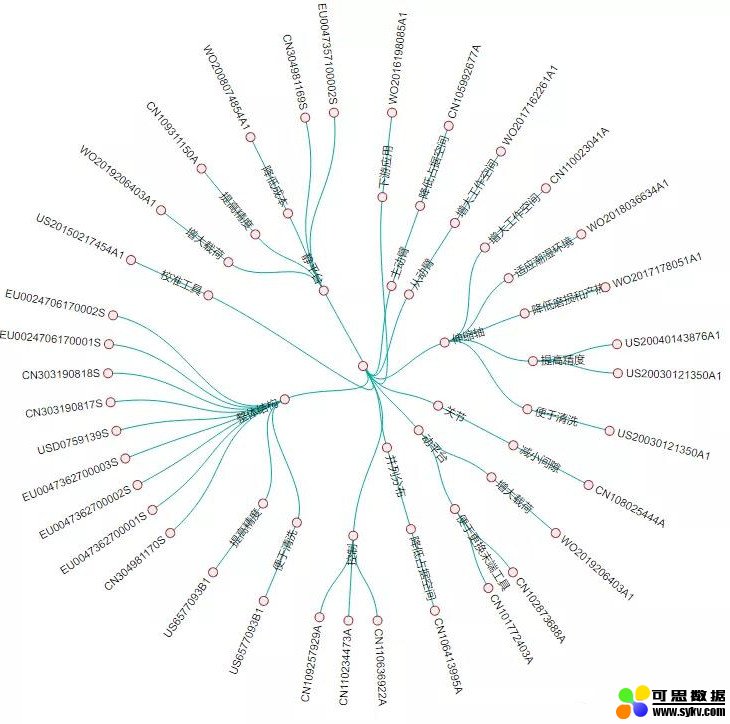
按照时间轴线,对ABB的相关专利进行梳理如下:
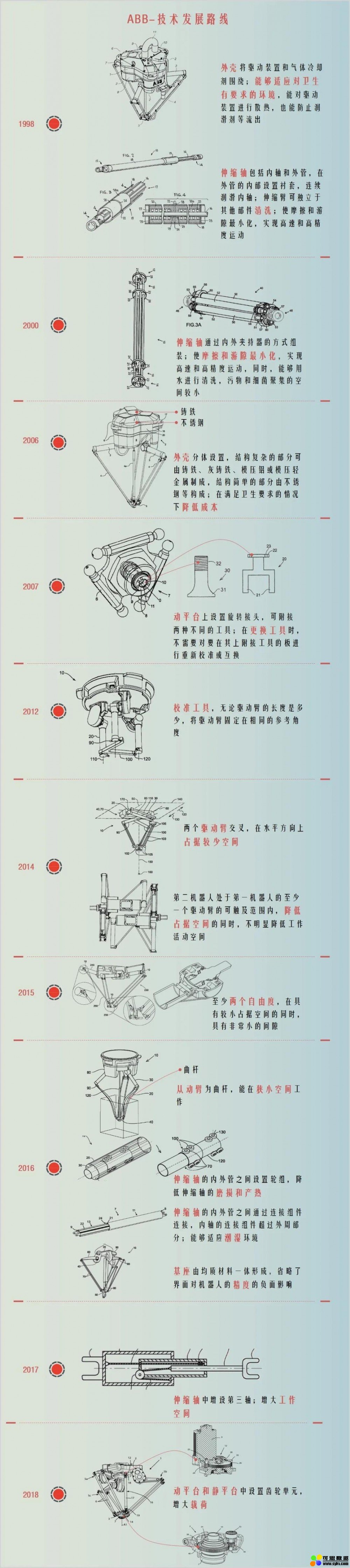
可以看出,ABB在对伸缩轴的结构方面,在不同的时间内做出了持续的改进。
➤ FANUC
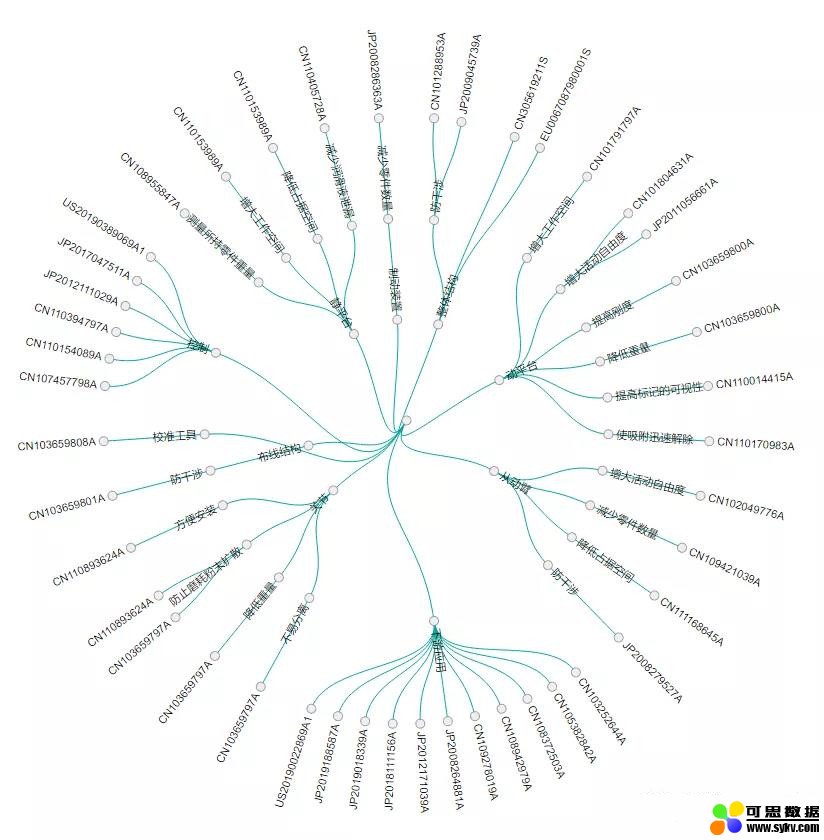
按照时间轴线,对FANUC的相关专利进行梳理如下:
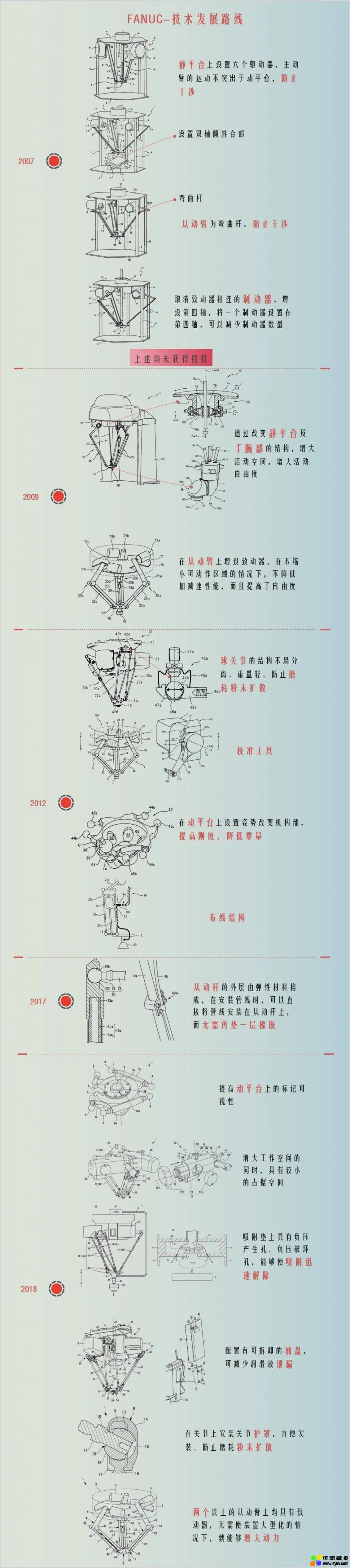
可以看出,FANUC的Delta机器人最大的特点在于在从动臂上设置了追加致动器,这对运动控制提出了非常高的要求,FANUC之所以敢采用这种方式,得益于FANUC在控制方面的深厚功底。

时间:2020-08-04 00:32 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















