教学案例|毕业设计之工业机器人力控装
近期,来自江南大学君远学院的吕青同学,在工业机器人研发实验室进行了关于开展毕设课题研究的工作。
君远学院,是一所拥有无锡市机器人工程技术研究中心、无锡市工业机器人公共服务平台、江南大学智能机器人与智能检测国际联合实验室等众多科研平台的学院,旨在培养高素质、强能力的机电融合卓越创新人才。
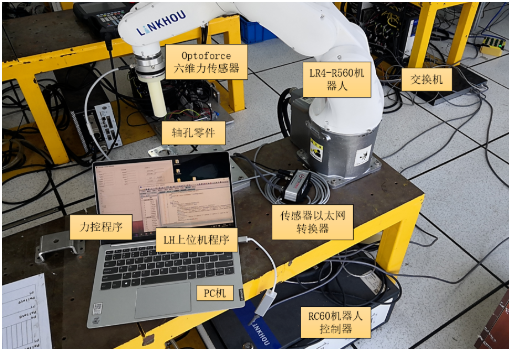
该课题的研究工作在博众进行,以灵猴机器人为实验设备,进行工业机器人力控轴孔装配实验。此次实验研究内容是轴孔装配,LH LR40-R560六轴机械手为控制对象,在机械臂末端安装optoforce六维力传感器来检测末端工件接触力信息,在PC端Visual Studio环境下编写力控界面。
传感器检测到力的信息作为信息输入,经过力控程序计算得到机器人的位置调整距离和姿态调整角度,从而实现自动寻孔和插孔作业。寻孔过程中机器人按照Z方向力作为反馈寻找平面内的入孔点,插孔过程中机器人根据XY方向力及力矩进行位姿调整,以防止出现发送卡阻的现象而引起机器人输出扭矩过大,导致动作失败情况,实验系统如下图所示。对机器人进行力控制能够使机器人对接触力更加敏感并产生一定反馈动作从而使机器人具有更好地柔顺性和自适应性,以补偿执行环境中的位置误差。
这段时间的实习让我体会到了学习与工作的差异,第一次真正地了解到工业开发是一种怎样的环境,了解到了科研与产品开发地区别,对于科研而言往往是对于方法的研究,对于可行性的研究,而市场化的产品往往需要更加注重的是客户的需求以及高可靠性,而对于这些问题的理解更有助于我在未来的学习与工作中更有目标性针对性地去发展。对于我的学业而言,借用公司的机器人传感器等设备较快速地搭建了实验平台,并且在许多工程师的帮助指导下,完成了我的毕业设计。
在实验方面很直观的一个感受是公司的实验室提供了一个比学校更加优良地实验环境,有非常齐全的各类设备,而对我帮助最大的是各位工程师们强大的专业知识储备与经验,给予了很多指导讲解,也让我学习理解了很多书本上比较晦涩难以理解的知识并运用到我的课题中,再次由衷的感谢公司以及工程师们的帮助。
毕业设计课程视频
公司简介
苏州灵猴机器人有限公司是一家集研发、生产、销售及服务于一体的专注智能制造和工业自动化领域的核心零部件供应商。
公司在苏州、深圳、北京、美国硅谷、德国斯图加特设立研发中心和据点,开发自动化核心零部件及其关键技术和算法。为了给客户提供优质的产品和服务,目前已在上海、深圳、北京、郑州、武汉等地设置分支机构,销售网络辐射全国,并成功登陆亚洲、欧洲和北美等市场。
历经多年开发积淀,灵猴自主研发的直线电机系统、机器视觉系统、工业机器人系列产品广泛应用于汽车、医疗、3C、食品、太阳能、半导体、新能源、包装等行业。
作为智能制造与工业自动化核心零部件的高新技术企业,灵猴一直秉承着不断进取、追求卓越的制造和经营理念,为客户创造价值的同时,引领行业技术发展,着眼现在、探索未来,助力中国制造业转型升级,成为“中国制造2025”及“工业4.0”的有力践行者。
Linkhou——灵动智造,厚积薄发。
Linkhou——智能制造与工业自动化领域核心零部件供应商。
为了应对市场需求,我们除了提供产品标准件外,可以根据客户的需求定制产品及解决方案。

时间:2020-05-30 23:13 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















