技术干货丨iGrinder力控打磨系列案例之三:力、位
项目需求
1.棒材成型后,可能有裂缝。经过无损检测后将缺陷位置和深度信息传递给打磨机器人系统,机器人系统进行智能打磨。
2.打磨深度的精度控制在0.1mm以内,修磨后表面圆滑,粗糙度Ra1.6。
3.适应多种型号的棒材。
该系统由宇立仪器和江苏金恒(股票代码872438)联合开发,宇立提供iGrinder®智能力控打磨解决方案,金恒提供视觉系统和项目集成。棒材修磨终端客户可联系江苏金恒洽谈合作事宜。
iGrinder®智能力控打磨解决方案
该方案集成了恒力控制和位置浮动功能,内置力传感器、位移传感器、倾角传感器和电气伺服控制系统,实时感知打磨力、浮动位置和磨头姿态等信息,能够自动补偿机器人姿态、轨迹偏差和磨料磨损,保证恒定的打磨压力,从而获得打磨效果的一致性。

作为独立的力控打磨系统,该方案脱离了对机器人力控软件的依赖。机器人只需要按照示教轨迹做运动,力控和浮动功能由磨头自行完成,用户仅需输入所需要的力值,即可轻松实现智能力控打磨。
iGrinder®是宇立仪器(Sunrise Instruments,www.srisensor.com,简称SRI)专利技术的智能力控浮动磨头。前端可搭载多种工具,如气磨机、电主轴、角磨机、直磨机、砂带机、拉丝机、旋转锉等,适用于不同的应用场景。
三大关键问题解析
关键问题1:轨迹误差和磨料磨损补偿
通过力反馈,iGrinder®始终保持磨削工具与工件的接触,消除了轨迹误差和磨料磨损的影响。
关键问题2:工艺一致性
经典打磨理论认为,在打磨压力、打磨时间和磨料磨削能力这三个参数一定的情况下,磨削量一定。iGrinder®始终保持恒定的打磨压力,辅之以优异的磨料,保证了工艺的一致性。
关键问题3:磨削量控制 – 最大的难题
系统采用了宇立仪器智能打磨软件平台SRiOperator3.0。该软件专注于机器人力控磨领域,能智能分析iGrinder力传感器数据、位移传感器数据、机器人实际坐标、视觉系统数据等,制定个性化的打磨工艺方案。

为了达到控制磨削量的目的,SRiOperator3.0首先从视觉系统获得产线数据。在打磨过程中实时采集iGrinder力传感器、位移传感器数据和机器人坐标数据。通过将机器人坐标和位移传感器数据做空间几何代数,分析反馈得到实际磨削量,然后控制iGrinder打磨压力的大小、打磨时间、打磨速度等参数,最终实现对打磨量的控制。
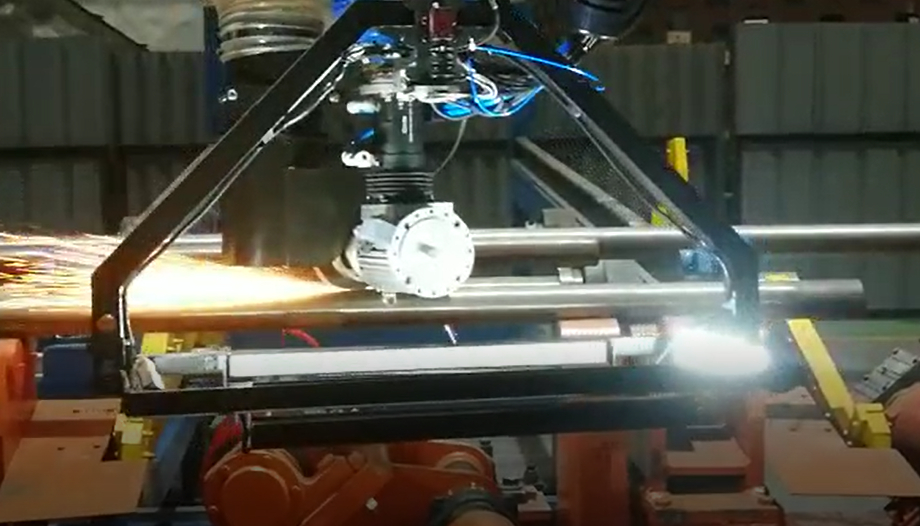
力位混合控制智能打磨视频

时间:2020-05-12 23:48 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















