有意思!如何“劝架”多台要“打起来”的工业
工业机器人也会“打架”,听起来有点意思。这里的“打架”其实是指多台工业机器人相互干涉,遇到这种情况该如何妥善处理呢?且先看干涉区是指:
干涉区:
同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:
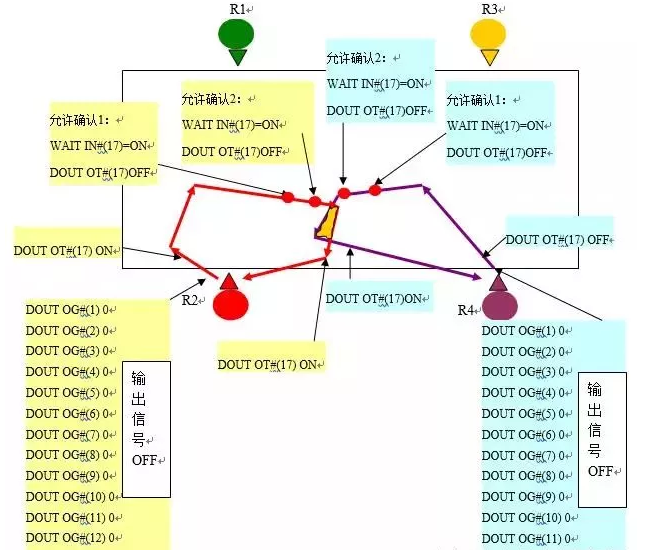
R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。

说明:
1)、关于程序结束时,干涉区信号的状态ON:
程序结束后状态:R2机器人的OT#(17)ON;R4机器人的OT#(17)ON。干涉区允许信号保持ON状态;因为 如果R4的干涉信号OFF,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:
防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
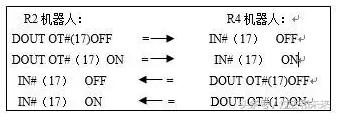
3)、在PLC编程中,信号关系:
信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、不同的干涉区使用不同的干涉信号:
如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。

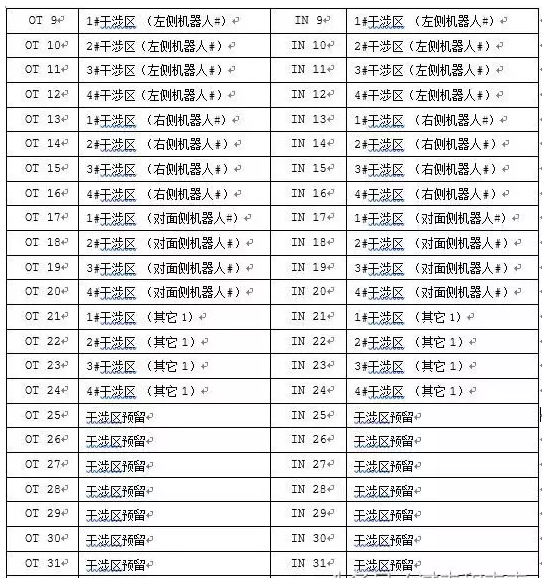
3、干涉信号地址分配:
从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:
4、机器人之间的互锁:
工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
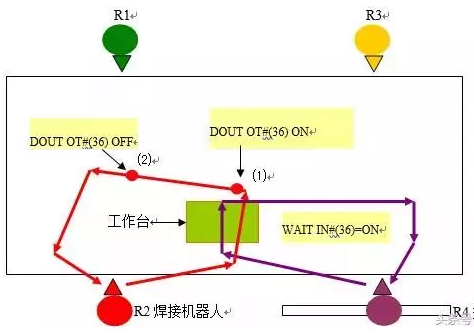
R2机器人与R4机器人之间的互锁:
R2机器人为焊接机器人,在工作台位置进行工件焊接,R4为搬运机器人,2台机器人在工作台位置处存在干涉现;
工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
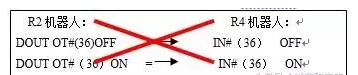
果使用IN(36)、OT(36)为互锁信号,则R2机器人完成焊接,到达位置(1)给出OT#(36)ON,R2机器人发出与R4机器人不干涉信号,到达位置(2)的时间大于0.5秒(即:大于信号传输+2*生产线PLC程序执行时间),或采取延时方式延时0.5秒关闭允许信号OT#(36)OFF;该信号在生产线PLC内进行自锁,当R4机器人完成抓件动作或循环完成后复位自锁信号。
生产线PLC程序,仅供参考(不是实际程序),目的说明与干涉区信号的区别。
5、机器人互锁信号使用地址分配表:

自锁:典型的应用是用自己的常开触点与开启按钮并联,锁定回路。即使开启按钮弹开了,由于有自锁触点的连接,仍可形成回路。这种接法就叫做“自锁”。
互锁:典型的应用是将继电器A的常闭触电串联在其他回路当中,而其他回路中继电器B的常闭触电串联在继电器A的回路中。当继电器A的线圈先得电时,它的常闭触电会断开继电器B的回路。相反,如果继电器B的线圈先得电时,它的常闭触电会断开继电器A的回路。这样互相牵制,起到一定的逻辑作用。这种接法就叫“互锁”。
在一个回路中,即有自锁又有互锁的就叫做“联锁”。
自锁,是在接触器线圈得电后,利用自身的常开辅助触点保持回路的接通状态,一般对象是对自身回路的控制。
如把常开辅助触点与启动的电动开关并联,这样,当启动按钮按下,接触器动作,辅助触电闭合,进行状态保持,此时再松开启动按钮,接触器也不会失电断开。一般来说,在启动按钮和辅助按钮并联之外,还要在串联一个按钮,起停止作用。点动开关中作启动用的选择常开触点,做停止用的选常闭触点。
互锁,说得是几个回路之间,利用某一回路的辅助触点,去控制对方的线圈回路,进行状态保持或功能限制。一般对象是对其他回路的控制。
联锁,就是设定的条件没有满足,或内外部触发条件变化引起相关联的电气、工艺控制设备工作状态、控制方式的改变。
“在一个回路中,即有自锁又有互锁的就叫做“联锁””这种说法并不科学,也不全面。

时间:2020-05-11 23:19 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















