波士顿动力发布机器狗Spot 2.0版本,特点:自治与
在将四足软件发布到世界上不到八个月的时间里,波士顿动力在5月6日发布了机器狗Spot Release 2.0,该版本的关键移动性改进和API新增功能,实现了增强自主导航、自治性、通信、有效负载支持等功能。

自主性改进与导航增强
波士顿动力公司业务开发副总裁Michael Perry表示,Spot 2.0实现了成为开发人员平台的愿景。Spot的早期使用者的许多关键需求已经融入到新版本中,从而使应用程序行为的原型更加容易。Spot的第一个版本是最低限度可行的产品,旨在证明该机器人可以执行自主行为,但是它有其局限性。
比如之前,您将站点设置到环路末端附近的一个位置,Spot必须走完整的路线才能到达这一点。 而使用Spot 2.0,您可以对机器人进行编程以达到这一点,它将找到到达那里并执行其动作的最短路径。Spot 2.0的地图仍然须手动创建,但是一旦机器人有了其工作环境的详细信息,它的行为就会更加自主。这对于不希望Spot一遍又一遍地走同一条路线的用户,或者对于Spot在紧急情况下找到最短路径的用户而言,非常重要。 例如,如果仪表出故障了,Spot可以更快地到达那儿,并拍摄仪表照片以了解发生了什么。
Spot 2.0更容易识别楼梯

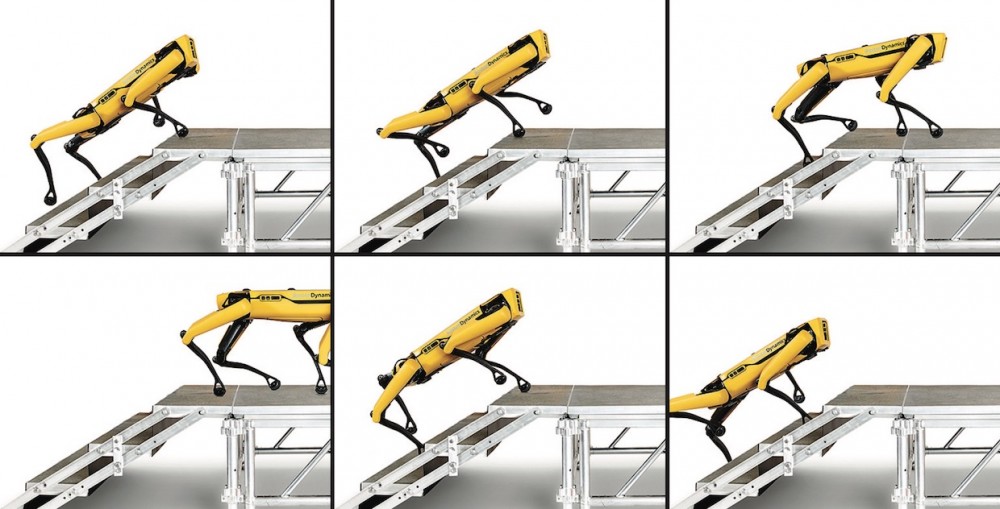
对于所有类型的足式机器人来说,楼梯都具有挑战性。波士顿动力公司过去曾演示过走楼梯的先进行为,但是这些功能并未完全融入到软件中。但现在Spot 2.0已经可以识别楼梯了。
Spot 2.0现在可以将楼梯识别为楼梯,而不是怪异的山丘,并应用一些基本的语义知识来估算几何特征,从而使楼梯攀爬更加安全和可靠。例如,Spot现在了解楼梯往往有规律地间隔开,这意味着它可以将楼梯模型拟合到其映射和传感器数据中,并且可以更好地了解四肢的安全放置位置。
更好地处理光滑的表面
Spot所处的工业场所大都有高度抛光的混凝土地面。这种地面人类都可能滑倒,更别说机器人了。所以Spot对于使用者来说是可靠的这点至关重要。

2010年波士顿动力就有发布过视频,该视频显示BigDog在冰面上滑倒。摔倒的并不优雅,机器人在试图保持平衡的同时到处挥舞着腿。波士顿动力公司不希望Spot做出同样的反应,因此对其力传感器进行了调整。机器人会知道它是否在打滑,并改变步态使其更平稳地做出对应步伐。
有效负载可以使用Spot API
Spot的新版本还具有Missions API(应用程序编程接口),该API提供了基于行为树的系统来对自主动作进行编程。它允许用户将Spot与用于自定义传感器和命令源的代码完全集成。
另一个增强功能是,有效负载现在可以使用Spot API来自动通知机器人有关其物理属性和主机上托管的服务的信息。以前,如果将外部有效负载安装到Spot,则必须进入软件并配置机器人以在Spot的身体位置获得一定量的有效负载。
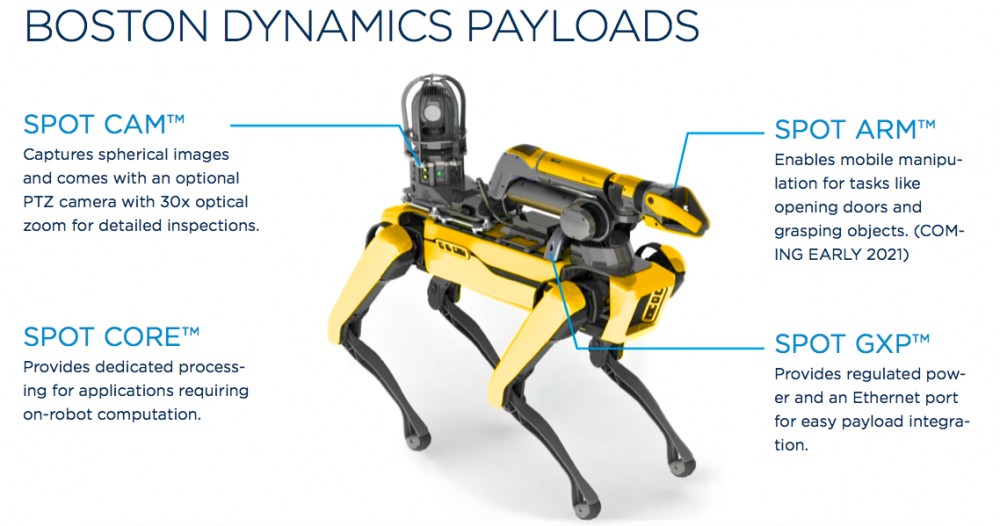
现在,添加一行代码,并告诉机器人这些特性。 然后,Spot会找出了如何改变其权重的方法。这对于现场更换有效载荷和快速迭代非常重要。”
下一步计划:Spot的头戴式手臂
展望Spot的未来可行性,Boston Dynamics创始人Marc Raiber表示,预计Spot的头戴式臂架将在今年的某个时候上市,这将使各种疯狂的新奇应用成为可能。

除了开门这种操作,随着机械手的安装还会拥有许多其他功能和特性。波士顿动力正在研究这个问题:也许是研发出可支持机械手的软件,运用云端AI来帮助机械手弄清楚它应该做什么。
虽然暂时Spot还不能成为可家用的机器人,但波士顿动力确实在设法实现这种可能,进行成本降低。
Raibert说“我热衷于将机器人提供给任何人,我们现在的目标之一就是找出哪些有效,哪些无效。我们不仅要向已有熟悉案例的人出售产品,例如检查炼油厂或发电厂,而且还要对其他行业发展更多应用。”
现在,全球有60多个Spot的早期使用者成员和120多个Spot机器人在工作。Raibert表示:“与Atlas不同,它具有足够的便携性,可以带回家,几乎只有200磅,而且带有液压装置”。在疫情期间,研究也没有停止,已经将35个Spot机器人与软件团队一起送回家进行继续测试研究。

时间:2020-05-08 18:54 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















