机器人系统遇到故障?这些诊断宝典帮你
运行ABB机器人时,系统突然遭遇故障?常见的故障诊断方式通常通过RobotStudio或是示教器显示的故障代码提示,在故障排除手册查找对应的解决方式。但是有些故障也是手册解决不了的,具体问题需要具体分析。
虽说故障诊断很多是靠个人经验,但是还是有些通用规则可以帮助快速排除故障。
那具体该怎么做呢?
首先,请根据技术支持团队的要求提供系统诊断文件和一些必要的日志文件。我们先来讲讲系统诊断文件,这是几乎每个case都需要的。
一般故障诊断文件解压后下会有如下文件和文件夹,我们就随机拿个现场系统诊断,
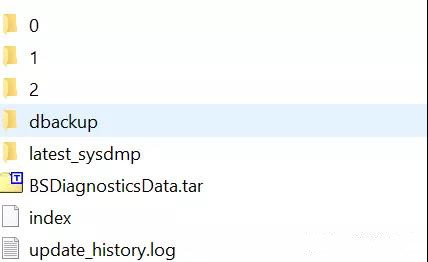
首先可以看到”Index”文件,用文本编辑器打开可以看到一个数字,指的是系统自动触发的Dump文件夹,系统自动触发指RobotWare启动脚本或是由Service_Debug添加的触发条件。通常Index会显示”0,1,2”指的是文件夹0,1,2。在本例中显示2,就是说最新的系统自动触发的Dump在文件夹2中。另外,由示教器保存的Dump文件会显示在latest_sysdump。
乍一看,比较显眼的文件是BSDiagnosticsData.tar。当用户问你我上次系统启动为什么会失败,我们从中可以看出原因。解压找到BSReason.txt打开,


可以看出系统上一次强制断电并且系统启动3次没成功进入Bootloader。
再讲讲latest_sysdmp文件下的内容,比较重要的几个,首先devices_show.txt
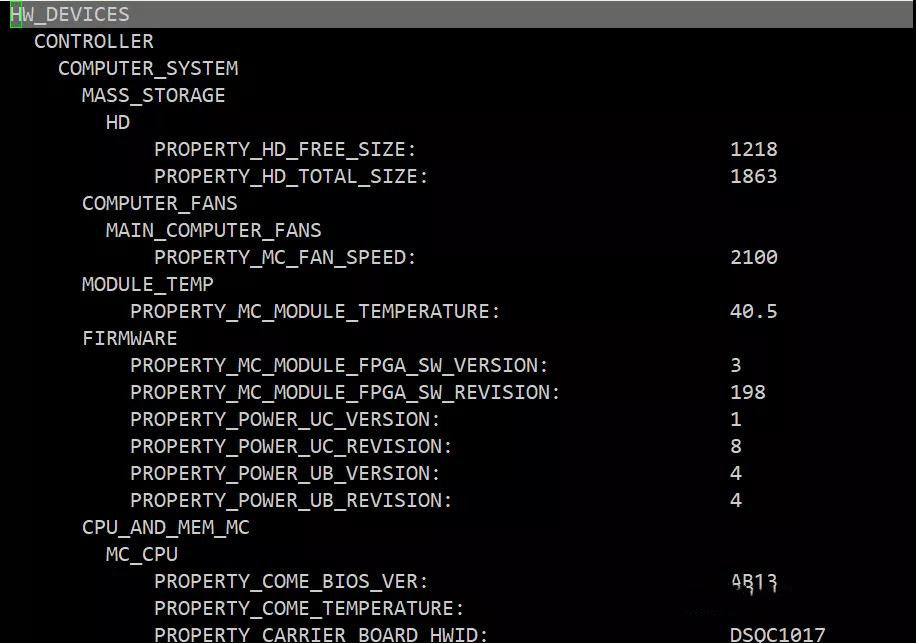
主要显示硬件设备的固件版本,物理属性。当我们知道某个固件版本有已知bug,那么我们直接做升级处理。
eio_sysdmp.txt这个文件里面显示了当我们出现故障时的信号状态,
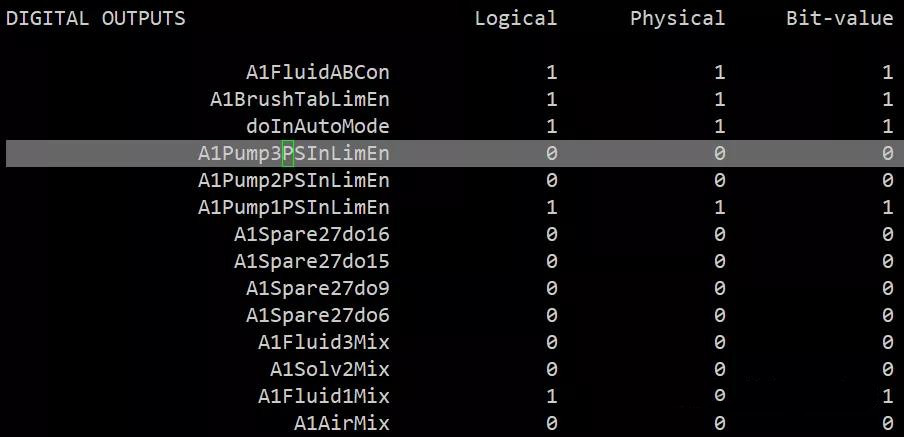
当然最重要的还是elog.txt,里面记录故障日志代码,对于做基本的分析还是很有用的。
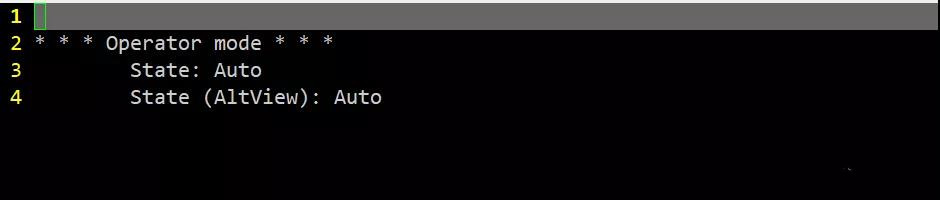
operator_mode_show.txt显示了故障发生时的操作模式(手动/自动),
系统故障排除的通用规则和诊断文件的分析。在诊断文件的根目录下会有update_history.log这个文件。它记录了系统最新一次升级的日期,对于做某些统计还是很实用的。
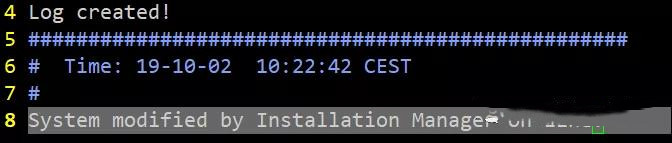
这个例子中记录了上一次升级是通过Installation Manager在19年10月2 日升级的。
继续讲下latest_sysdmp的内容,
从RW6.10.01开始会多一个名为fpcmd.log的文件,主要是当示教器有故障时生成诊断日志。当然这个文件相对比较专业一点,通常技术支持团队会进行初步分析。
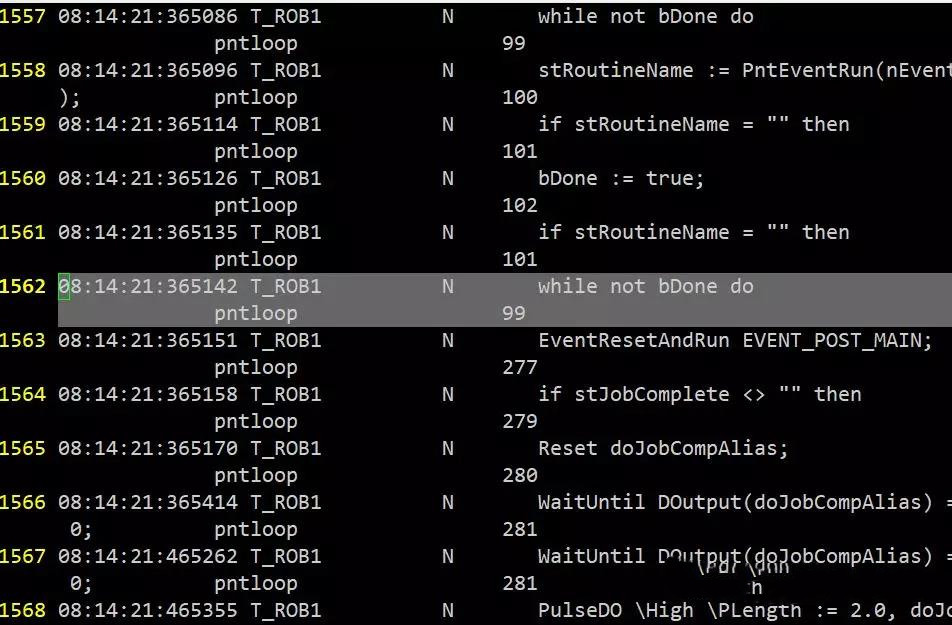
pgm_show.txt这个文件记录了做诊断时程序的运行状态和指针位置。比如说,当用户执行某一程序报错,机器人停止运动。我们为了找到执行到哪一句报错,那么就需要诊断里的这个文件探究。
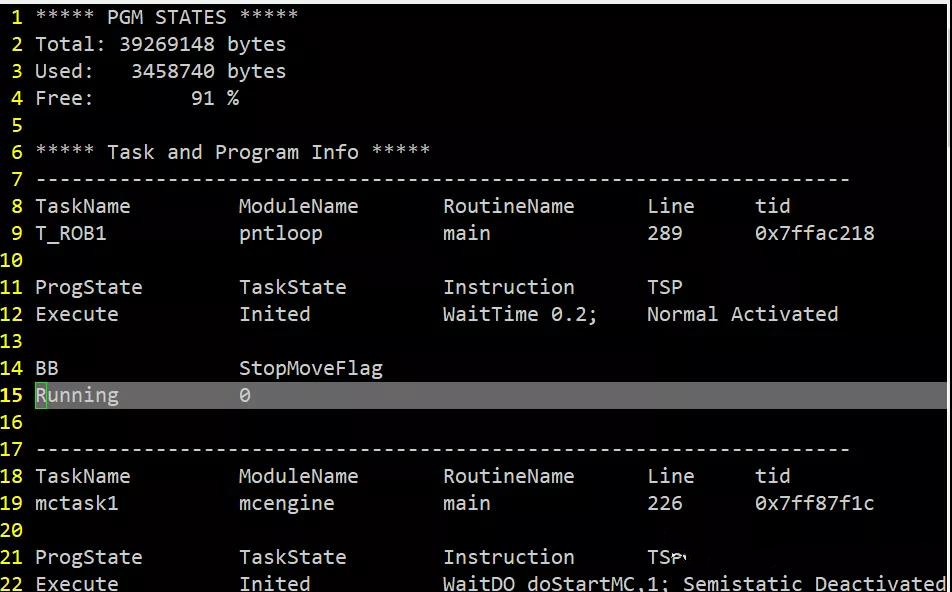
本例是程序正常时保存的诊断,T_ROB1在指针在初始位置。所以要强调的是发生故障第一时间保存诊断文件!一旦复位,很多重要信息都丢失了。
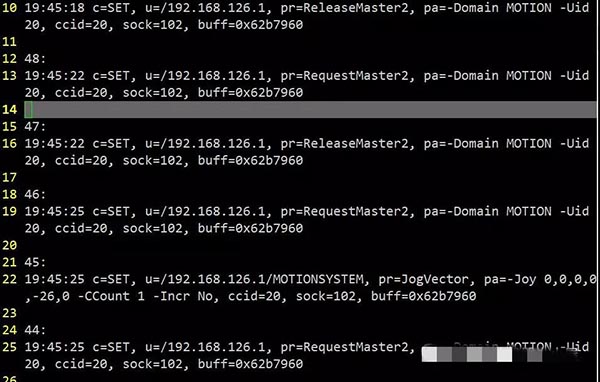
接下来比较有用的是robdisp_show.log,它记录了示教器发送给机器人控制器的命令和历史记录,
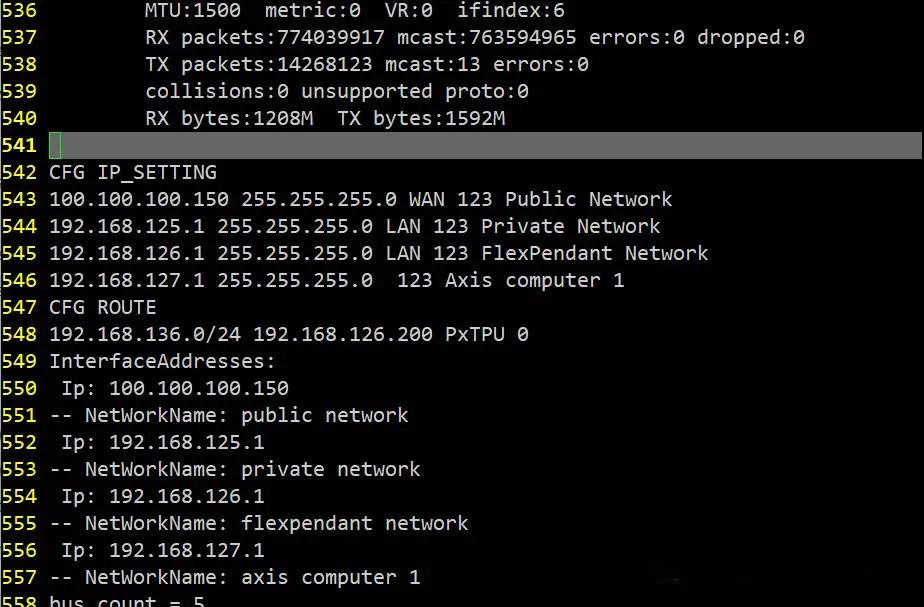
下一个比较重要的是sysdmp_default_show.txt,这里面记录了很多关于系统配置、系统信息和网络配置等。
当执行程序时有些异常的情况,如与原先路径不同,功能发生偏差等情况,我们可以查找具体程序执行的逻辑顺序来排查。这里要讲一个pgmrun_spy_circular.log
这里清晰的记录了程序执行的顺序和步骤。接下来的几个文件都是ABB喷涂机器人特有的。
首先pntloop_log_show.txt,记录了生产日志,包括程序号,物料号,刷子表,周期等。

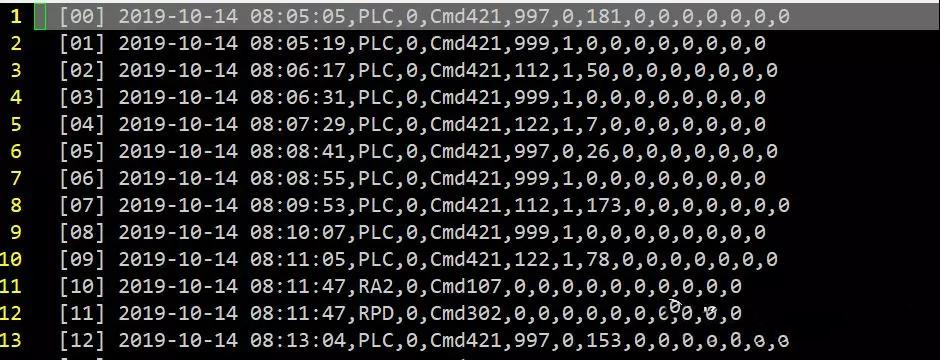
其次,pntprot_log_show.txt,记录了PLC给机器人发送的指令。
还有就是pntsup_ips_dump_show.txt,记录了集成工艺系统(IPS)的故障诊断信息,

时间:2020-04-27 23:35 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















