机器人控制指令介绍(二)
本文旨在通过指令介绍及程序示例帮助读者了解和学习发那科机器人OFFSET(偏移)指令、工具/用户坐标系调用指令、其它指令(包含用户报警指令:UALM[i]、计时器令:TIMER[i]、倍率指令:OVERRIDE、注释指令:!(Remark)、消息指令:Message[message]、参数指令:Parameter name)的使用方法及注意事项。
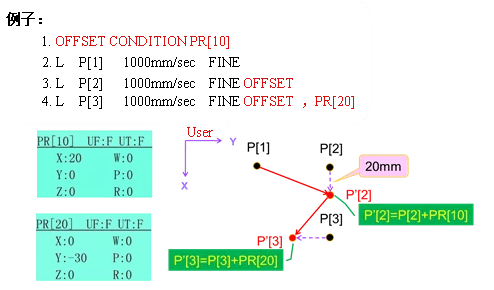
1. 偏移指令OFFSET
通过此指令可以将原有的点偏移,偏移量由该指令中位置寄存器所存储的数据决定。
(1)位置补偿条件指令:OFFSET CONDITION PR[i]/(偏移条件 PR[i])位置补偿指令:OFFSET(偏移)

(2)偏移指令 :OFFSET,PR[i](偏移,PR[i])

如何在程序中加入OFFSET(偏移)指令?
1)进入编辑界面
2)按F1[指令]键,显示“指令”菜单,如下图所示:
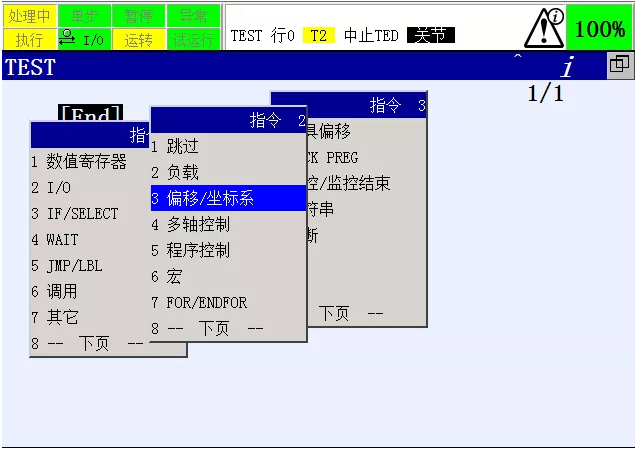
3)选择“偏移/坐标系”,按ENTER键确认,出现下图所示画面:
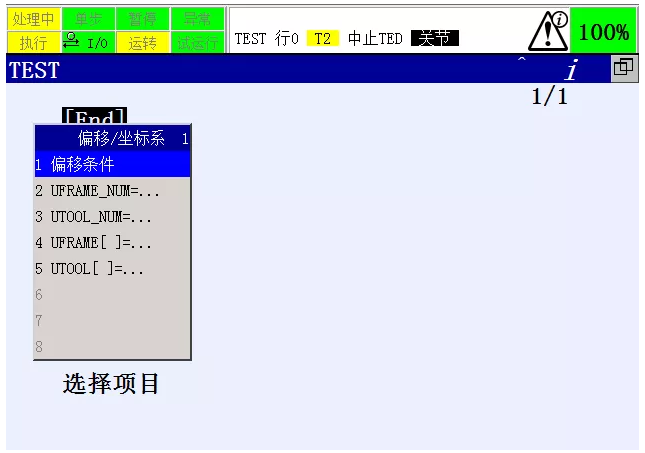
4)选择“偏移条件”,按ENTER键确认;
5)选择“PR[ ]”项,并输入偏移的条件号。

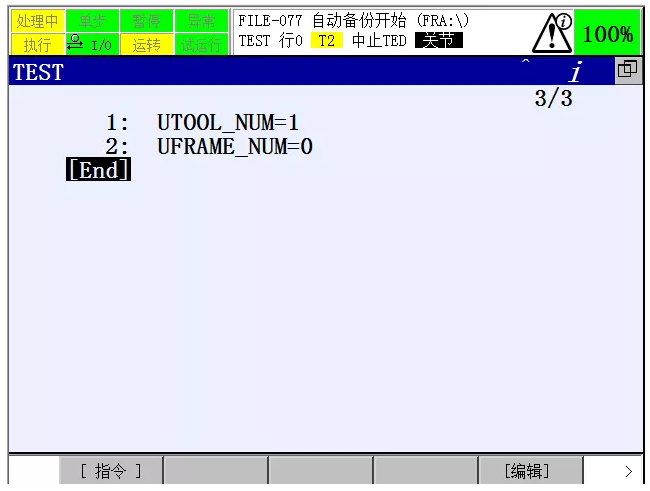
2. 工具坐标系和用户坐标系调用指令UTOOL_NUM/UFRAME_NUM
工具坐标系和用户坐标系调用指令用来切换当前所选工具或用户坐标系编号
如何在程序中加入UTOOL_NUM/UFRAME_NUM指令
1)进入编辑界面
2)按F1[指令]键,显示“指令”菜单,如下图所示:

3)选择“偏移/坐标系”,按ENTER键确认;
4)选择“UTOOL_NUM”或“UFRAME_NUM”,按ENTER键确认,如下图所示:
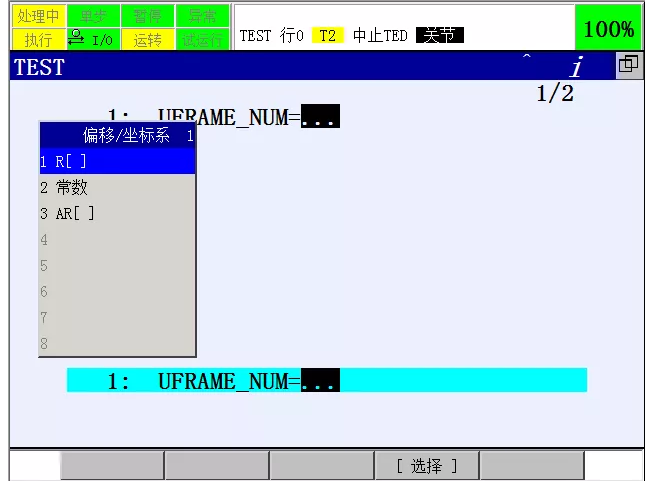
5)选择UTOOL_NUM或UFRAME_NUM数值的类型,并按ENTER键确认;
6)输入相对应坐标系编号值(工具坐标系编号:1-10;用户坐标系编号:0-9),结果如下图所示:
3. 其他指令
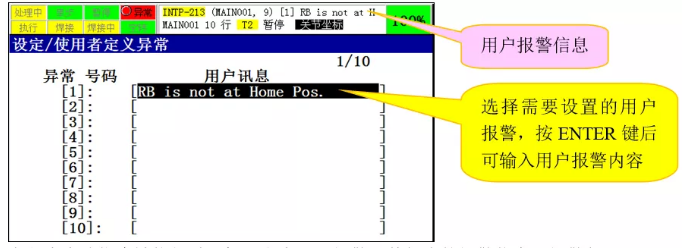
3.1用户报警指令UALM[i] (默认情况下,i=1~10)
要使用该指令,首先设置用户报警;
步骤:依次选择按键MENU→设置→用户报警,即可进入用户报警设置界面,如下图所示:
在程序中该指令被执行时,机器人会出现报警及其相应的报警信息(报警代码:INTP-213)。
3.2计时器指令TIMER[i] (默认情况下,i=1~10)
TIMER[i]=RESET 将计时器i清零
TIMER[i]=START 计时开始
TIMER[i]=STOP 计时结束
查看计时器时间步骤:
1)依次按键选择MENU → 0 下一页 →状态;
2)选择“程序计时器”,即可进入程序计时器一览显示画面,如下图所示:

3.3速度倍率指令OVERRIDE
OVERRIDE=(value)% value=1 to 100 间的任意整数;
速度倍率指令用来改变速度倍率的大小。
注:速度倍率的大小对机器人的点动速度和程序执行的快慢都有影响。
3.4注释指令 ! (Remark)
!(Remark)
Remark:注解,最多可以有32字符。
3.5消息指令 Message[…]
Message [message]
Message:消息,最多可以有24字符
当程序运行该指令时,USER画面会弹出含有message的画面。

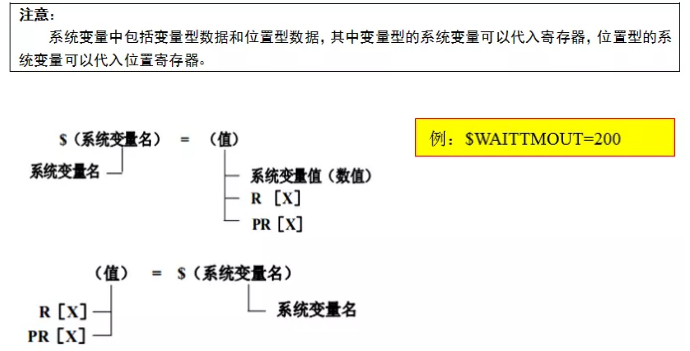
3.6参数指令(Parameter name)
参数指令,可以改变系统变量值,或者将系统变量值读到寄存器中。
如何在程序中加入这些指令?
1)进入编辑界面
2)按F1[指令]键,显示“指令”菜单,如下图所示:
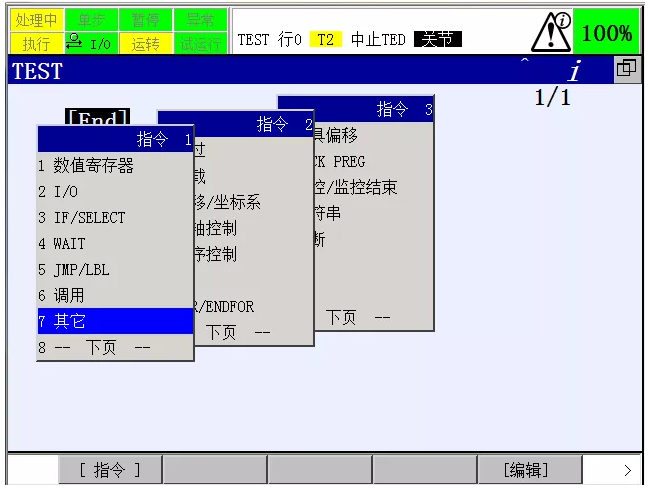
3)选择“其他”,按ENTER键确认,显示下图所示画面:
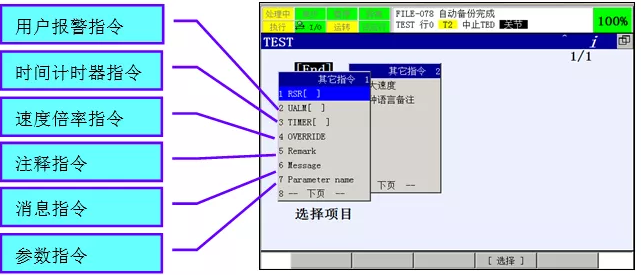
4)选择所需指令项,按ENTER键确认;
5)输入相应的数值或内容。
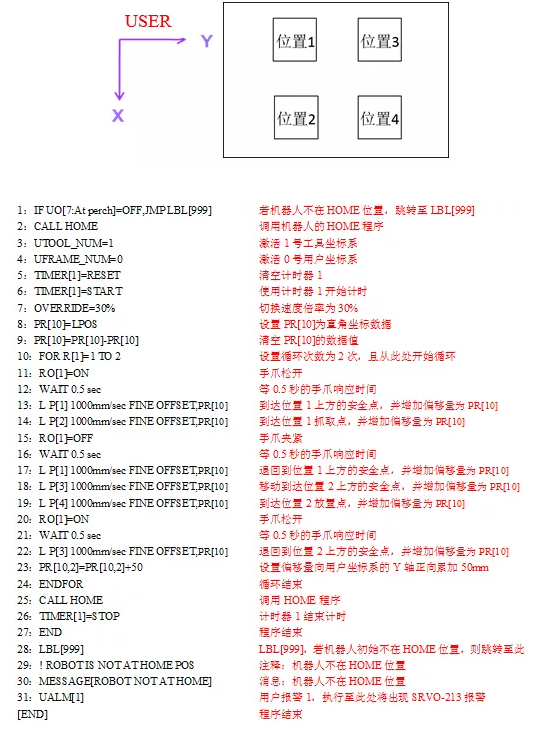
4.应用实例
取两个工件分别放置于下图所示的位置1和位置3处,现在需要机器人将工件从位置1搬运到位置2、从位置3搬运到位置4。请根据要求进行程序编写。
要求:若机器人处于HOME位置,则执行搬运动;若机器人不在HOME位置,则在用户界面上指明机器人不在HOME位置,并给出用户报警。程序中使用0号用户坐标系和1号工具坐标系,速度倍率为30%,使用TIMER[1]记录搬运过程执行时间。

时间:2020-04-26 23:02 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















