机器人控制指令介绍(一)
今日分享关于发那科机器人控制指令介绍,包括I/O指令、IF\SELECT指令、WAIT指令、JMP/LBL指令、CALL指令以及FOR\ENDFOR指令的使用方法及注意事项。
1.I/O指令
I/O指令是改变向外围设备输出信号状态,或读出输入信号状态的指令。
例如:
注意:I/O在使用前需要进行配置。
如何加入I/O(信号)指令?
1)编辑界面中,按F1【指令】(INST)键,显示图1画面:
2)选择I/O,按【ENTER】键确认,显示图2画面:
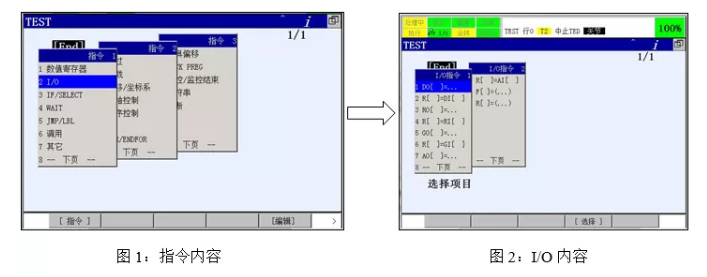
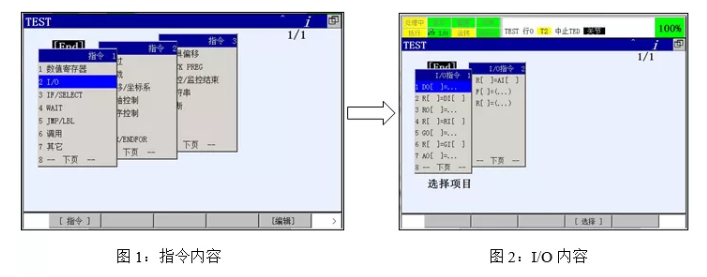
3)选择所需I/O指令,按【ENTER】键确认;
4)根据光标位置输入值或选择相应的项并输入值。
2.条件比较和条件选择指令 IF/SELECT
2.1条件比较指令 IF
IF 条件满足,JMP LBL[i] / Call子程序
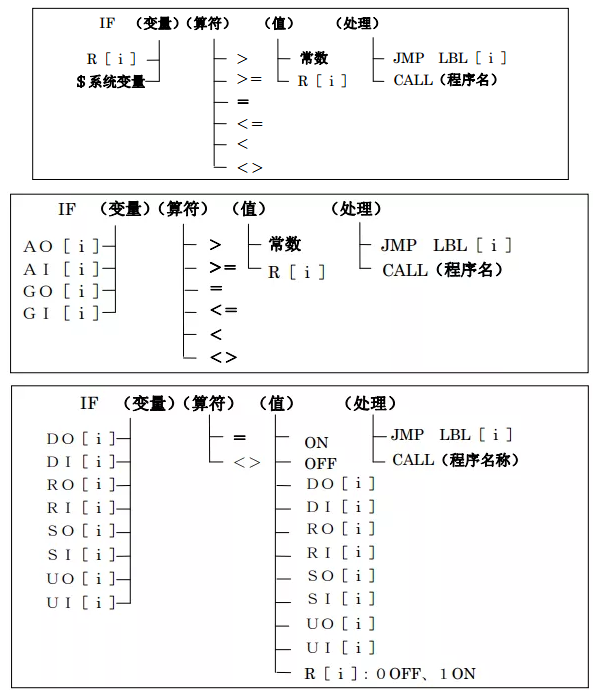
图3:IF指令支持的条件和计算
注意:IF指令可使用逻辑算符(AND、OR)连接条件,单条IF指令最多可连接5个条件,且“AND”和“OR”不能混合使用。
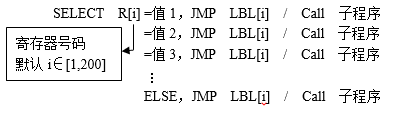
2.2条件选择指令 SELECT
如何加入IF/SELECT指令
1)编辑界面中,按F1【指令】(INST)键,显示图4画面:
2)选择【IF/SELECT】,按【ENTER】键确认,显示如图5:

3)选择所需项,按【ENTER】键确认;
4)根据光标位置输入值或选择相应的项并输入值。
3.待命指令 WAIT
可以在所指定的时间,或条件得到满足之前使程序执行待命。
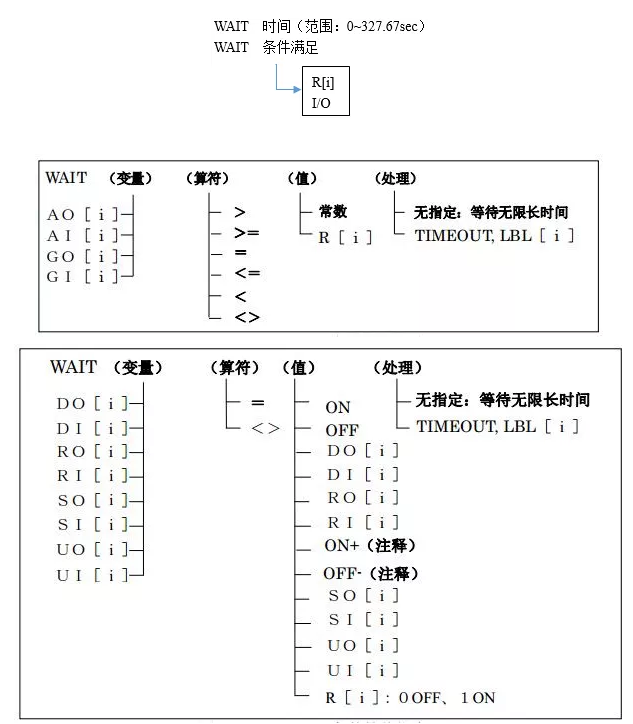
图5:WAIT指令支持的条件和计算
注意:
1.可通过逻辑运算符“or”(或)和“and”(与)将多个条件组合起来,但“or”和“and”不能在同一语句中使用。
2.若程序中的条件不满足,则会一直处于等待状态。
若要解除等待状态,处理措施如下:
如需人工干预,可通过【FCTN】键,显示图6画面,选择7 【解除等待】(RELEASE WAIT)跳过等待语句,并在下个语句处等待。
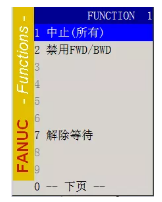
图6:FCTN功能界面
使用等待超时跳转指令
$WAITTMOUT=n (单位:10msec)
WAIT ……,TIMEOUT LBL[i] 等待超时,跳转至LBL[i]
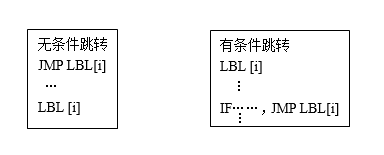
4.跳转/标签指令 JMP/LBL
跳跃指令:转移到所指定的标签
标签指令:指定程序转移目的地的指令。
如何加入JMP/LBL指令
1)编辑界面中,按F1【指令】(INST)键,显示图7画面:
2)选择【JMP/ LBL】,按【ENTER】键确认,显示图8画面:

3)选择所需要项,按【ENTER】键确认,并输入相应的标签号;
5.程序调用指令 CALL
使当前执行的程序转移到其它程序(子程序)。
注意:被调用的程序执行结束时,自动返回主程序调用指令后一行。
Call (Program) Program :程序名
程序调用指令除了能调用程序外,也可以调用【结束】(END)
结束指令用来结束程序的执行。
如何加入CALL指令
1)编辑界面中,按F1【指令】(INST)键,显示图9画面:
2)选择【调用】(CALL),按【ENTER】键确认,显示图10画面:
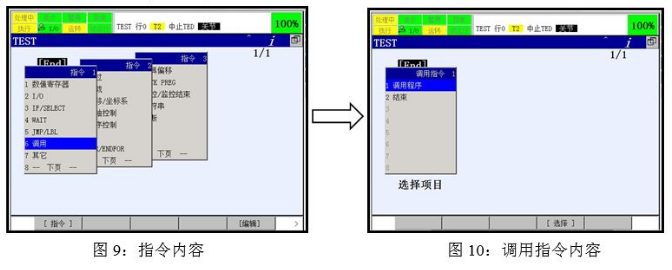
3)选择【调用程序/结束】(CALL program / END),按【ENTER】确认。
6.循环指令 FOR/END FOR
使用该指令来包围需要循环的区间,指定循环的次数。
FOR R[i] = (value) TO (value)
FOR R[i] = (value) DOWNTO (value)
Value: R[i]或Constant,范围从-32767到32766的整数
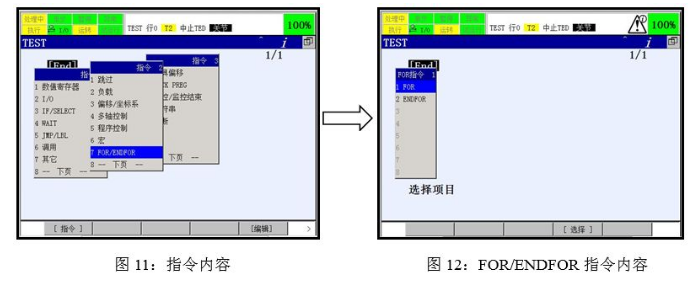
如何加入FOR/ENDFOR指令
1)编辑界面中,按F1【指令】(INST)键,显示图11画面:
2)选择【FOR/ENDFOR】,按【ENTER】键确认,显示图12画面:
3)选择所需要项,按【ENTER】键确认;
4)根据光标位置输入值或选择相应的项并输入值。
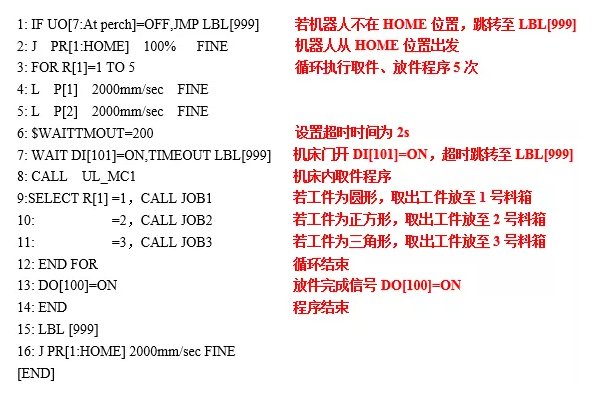
7.程序示例
程序作用:
1)机器人从HOME位置出发,拾取不同形状工件进行分装;
2)若机器人初始位置不在HOME点,则不进行分装工作,仅指定机器人返回至HOME位置。
寄存器说明:
1)R[1]值表示不同形状的工件;
圆形工件:R[1]=1;
正方形工件:R[1]=2;
三角形工件:R[1]=3;
2)可通过外围设备识别工件形状后,以数值形式发送给机器人的寄存器R[1]。

时间:2020-04-26 23:05 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















