关于库卡机器人的 安全操作与故障处理
关于库卡机器人停机方式
一.概要:
下图这张来自库卡教材上的图片展示了在各模式下,各种操作触发带来的停机方式:
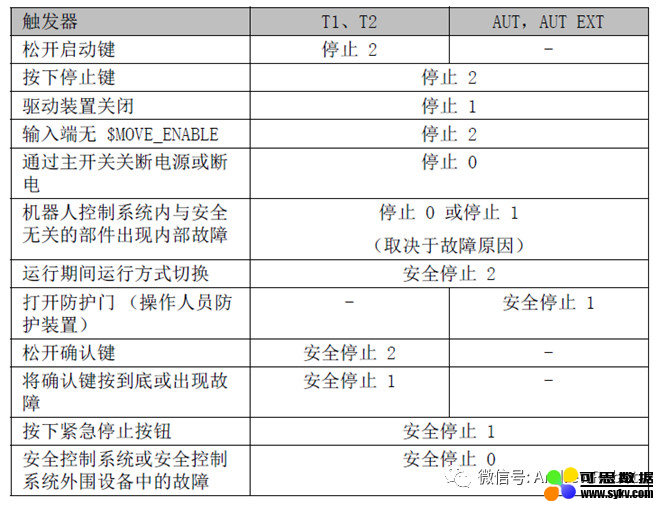
由表可以看出库卡机器人停机方式可以分为以下几种:
(1)与安全相关的停机方式: 安全停止 0 | 停止1|停止2;
(2)安全无关常规停机方式: 停止0 |停止1 |停止 2;
二.停机方式说明:
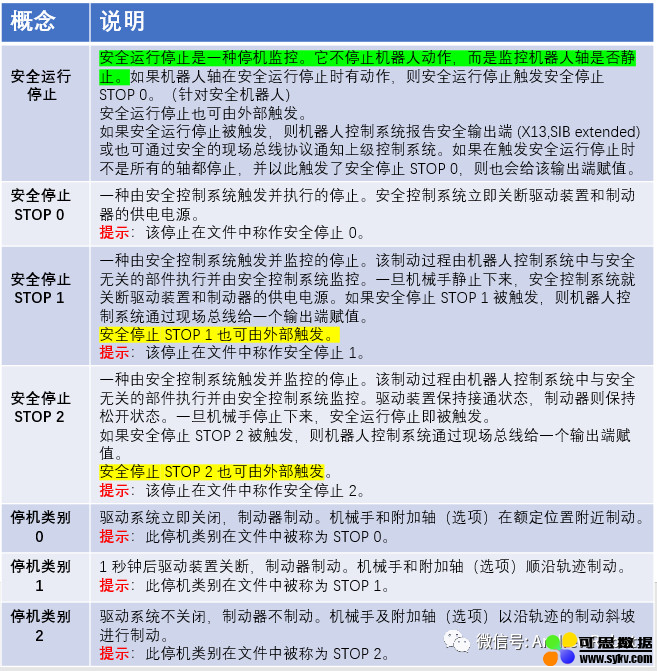
安全停止跟机器人安全控制器相关,无论硬件系统安全,还是现场总线安全(比如FSOE/ProfiSafe/EthernetIP CIP).常规停机方式可以解释简化如下表:

三.拓展部分
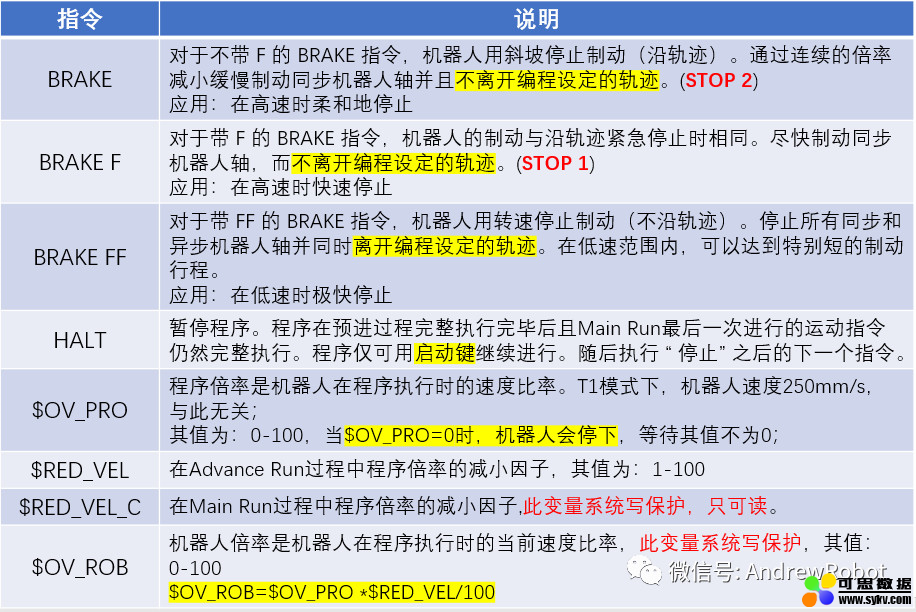
一些指令或变量的使用,会对机器人停机有所影响,具体见下图:
总结安全与人们的生活息息相关,接触任何事物请先了解其安全。
库卡机器人故障处理
2.KSS03070-无合适的mam文件/KSS01422 -$MAMES_ACT值无效
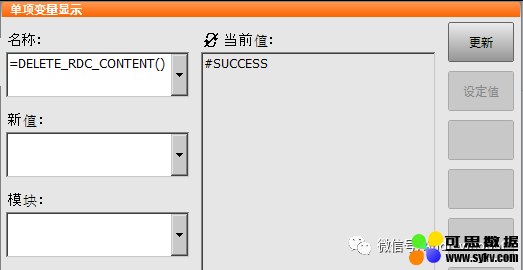
原因:当$INDIVIDUAL_MAMES=#RDC时进行零点校正时,控制器会访问硬盘上的偏差值并计算机器人具体的校零位置。如果值不对的化,则无法校正零点位置。此时需弄清楚机器人是普通版机器人还是高精度HA机器人,可以看机器人铭牌,如:KR16_2 FLOOR.
(6).选择“否”。
(7).示教器显示对话框“请给出机器人序列号。只可对RDC进行一次编程。“
(8).把机器人的序列号输入,机器人的序列号在本体铭牌上。
(9).关闭保存。

(3).如果外部控制的话,检查外部信号,比如PLC控制;如果此时想手动移动机器人的话,需要将1改为1025($IN[1025]为常TRUE);
(4).关闭外部自动运行窗口,返回HMI。
库卡机器人Win10装wv兼容
一.概要:
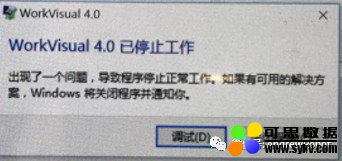
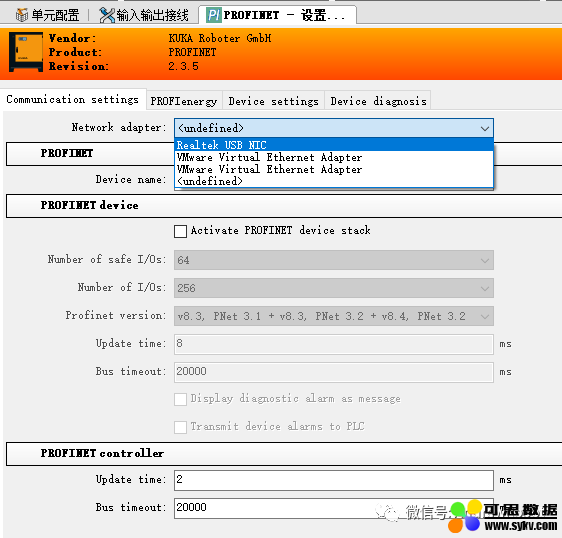
用win10系统的老铁们,在安装WoV4.0.X或者WoV5.0.x后,打开总线配置时WoV会停止工作:
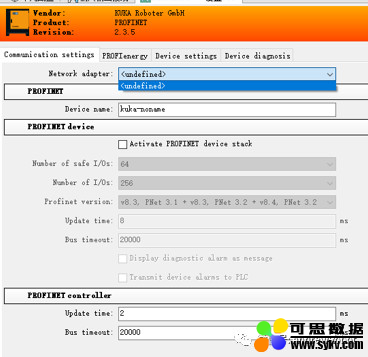
准备在线连接总线时,发现没网卡适配器供选择:
并且信息窗口有报错信息提示:

发生这种情况原因是因为winpcap软件本版本较久,不适用于Win10系统导致无法访问网络。
科普winpcap(windows packet capture)是windows平台下一个免费,公共的网络访问系统。
二.解决方法:
Step 1:进入电脑控制面板,进行程序旧版winpcap卸载,卸载完可以重启电脑:

Step 2:下载win10适用的winpcap:

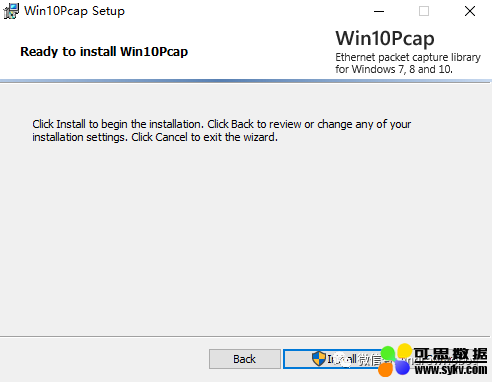
Step 3:按顺序一步步安装Win10Pcap:
Step 4:重新打开Wov,激活项目并进行总线配置或连接:
此时发现网卡适配器被识别了,此时可以进行正常的连接或配置;因此,使用win10系统的老铁们可以按照文章步骤将自己的winpcap 升级,以免后面遇到此问题。另外,当winpcap正常使用的时候,可以对机器人进行数据抓包,依据不同总线方式,比如:KLI等。

时间:2020-01-20 14:09 来源:可思数据 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















