协作机器人、通用机器人换手系统
协作机器人Bin-picking应用
如何在非结构化环境中实施协作搬运方案?
雄克与 KUKA 和 Roboception 公司合作调研了这一课题。
三家公司展示了关于Bin-picking的研究中,如何得以快速、简易且有效地实施协同作业的应用案例。

可以即刻对应用进行编程并使之适应新的工作环境
示例任务是一个实际的应用设计:协作机器人从箱中抓取出未分类的金属部件,并将它们放入磨床,机加工之后再放置到具体位置存放。在操作期间,工人应能够同时进行手动进给、移动或拆除运输箱或单个部件。通过这一方式,该研究将箱中取物 (Bin-picking) 与人机协作 (HRC) 的概念相结合,并对来自机器人技术、抓取技术和图像识别的不同基准技术的交互作用加以利用。Roboception 的3D摄像头 rc_visard 通过应用基于 CAD 的匹配,捕获未分类的工件。这是首次通过 3D 传感器使机器人得以执行 3D 测量和空间定位这两项任务,并直接在摄像机系统中,在 1s 内处理全分辨深度图像。随后,确定每一种情况下的最优抓取点,不是通过电脑,而是将它们直接传输至具有协作能力的 KUKA 机器人。所使用的工业级传感器还能够交付深度图像、高精度图像和可信度图像。后一功能可用于通过人工智能 (AI) 方法进行决策的依据。由于3D摄像机可以既在自然光条件下,又在人工照明条件下识别其周围环境,因而可以应用于各种不同类型的工作环境。
Co-act 机械手系列
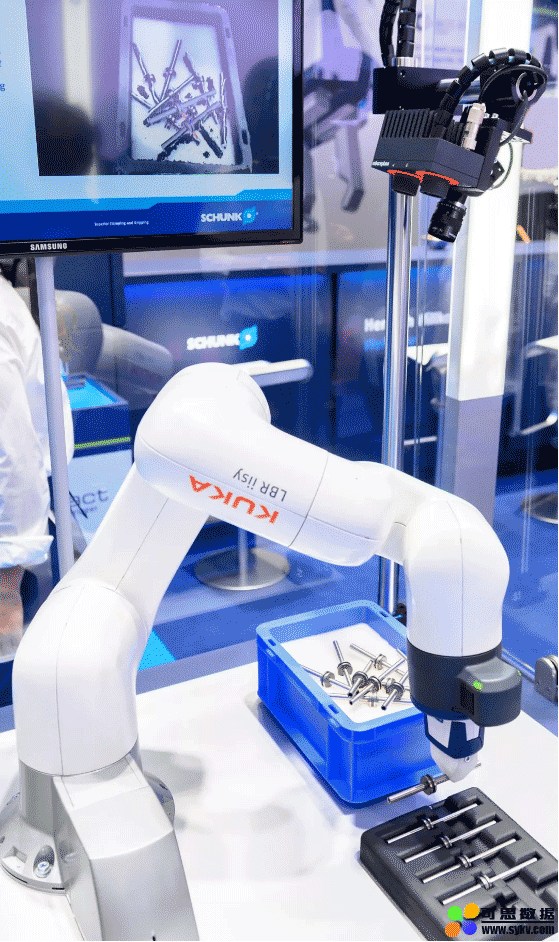
Roboception 经济款 rc_visard 可在 1 秒内为未分类工件确定最优抓取点,之后KUKA 协作机器人使用 SCHUNK Co-act 机械手,完全自动地拆除部件并将其插入虚拟机。工人可以在进行过程中随时干预
协作机器人的前端配备有针对特定应用设计的 SCHUNK Co-act 机械手,满足 EN ISO 10218-1/-2 和 ISO/TS 15066 的要求,实现与人类的安全互动。所有的调节和电力电子装置都集成在机械手内部,不会占用控制柜内任何空间。其界面和尺寸及干扰半径均单独适应雄克的应用。除了针对特定应用的 Co-act 机械手之外,雄克还提供协作应用的标准机械手系列,包括 SCHUNK Co-act EGP-C,经 DGUV 认证的小型机械手,以及即将推向市场的SCHUNK Co-act EGL-C 长行程机械手,后者将是雄克机械手首次在人机协作应用中达到 450 N 的抓取力。
直观的机器人编程
使用协作机器人搬运可以对新的放置位置进行非常方便、直观的编程。在发生意外中断时,KUKA 机器人可以记住每一次执行的移动或操作,并可以在不进行重新学习的情况下以点对点模式继续工作。由于能够很方便地既在传感器侧,又在机器人侧实施解决方案,且几乎无需培训,该方案适合各类应用和用户群。不要求有关机器人技术或图像处理的丰富知识。它还使集成工作量减少至最低。根据需求,摄像机系统可以加以扩展,从而包含神经元学习用附加投影仪和模块。可以在静止模式或移动模式下,于协作机器人上对其进行操作,这意味着可以在移动平台上实现更为灵活的抓取方案。
通用机器人换手系统,
可搬运重量最高达 50 kg
SCHUNK SWS-046 气动快换系统可快速、可靠地在机器人前端实现各种机械手和工具的更换。其有四种可选的模块安装接口,为连接气动、液压或电动执行器提供了高功率模块、自密封流体模块和伺服模块等可选项。另一项独特的优势是,配备各类可连接电动执行器和传感器的模块。例如,雄克提供了 PROFIBUS、PROFINET、CAN、RS232 和 EtherNet TCP/IP 模块,可接收来自诸如电动机械手或力/力矩传感器的信号。电路通道可根据应用模块化调节。

SCHUNK SWS-046 快换模块最高负载 50 kg,并为末端执行器供能和信号传输提供大量可选项
自锁功能和集成的活塞行程检测系统
SWS-046 螺纹连接符合机器人侧 ISO 9409-1-100-6-M8 要求。雄克也提供 ISO 法兰式定心环可选项,这意味着无需使用额外的转接板,即可在绝大多数机器人上使用该模块。快换机器人侧和工具侧间距在 2.5 mm 之内时,通过“非接触锁定系统”专利技术保证可靠连接完成工具快换。如果遇到了紧急停止或突然断电等情况,该系统专利的自锁功能确保快换机器人侧和工具侧之间仍保持安全连接。内置的活塞行程监测系统,可随时监测模块的锁定状态。最大允许力矩负载为 678 Nm (Mx, My) 或 882 Nm (Mz)。
本文来源于网络!

时间:2019-10-26 11:15 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















