优化机器人室内导航新方式:重复捕获环境变化
近日,来自德国波恩大学的两名研究人员公布了一种关于优化机器人室内导航的方式,这种方式的实质是通过重复捕获环境变化并利用数据分析,以做出更明智的导航决策。该方法的相关论文被发表在arXiv上。
机器人室内导航技术被广泛应用于扫地机器人、医院机器人、物流机器人等。此前的导航技术是基于预先设计的运行环境和传感器收集的观测结果来规划路径,在实际应用中,这种导航策略对于静态环境能够适应,但无法实时感受环境变化,无法解决意料之外的障碍。
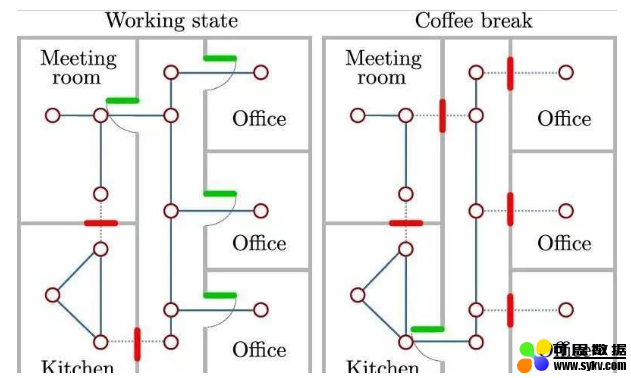
在办公室重复配置的简单示例
针对这种技术痛点,德国波恩大学的研究人员给出了新方案,这个方案使机器人能够预测环境,规划最短导航路线,而且在动态环境的实验中,表现十分出色。
预测环境,规划路线
与此前的室内机器人导航技术,最大的不同是,新的优化方案使机器人具备更多的自主能力,甚至可以预测环境,收集信息,规划最短的路线。
这个研究基于此前更早的一项研究,该项目人员将机器人置于室外环境,通过动态环境的变化,收集地形信息、障碍物避让等,使用这些数据来计算轨迹,以最大程度地减小机载振动和功耗。
“这项研究的想法是,室内空间的许多变化都是在重复空间模式之后发生的,例如门同时打开和关闭。” 进行这项研究的研究人员之一洛伦佐·纳尔迪(Lorenzo Nardi)说道,“在这些环境中部署了较长时间的机器人可以观察并不断收集有关它的信息,并利用这些知识来计划更好的导航策略。”
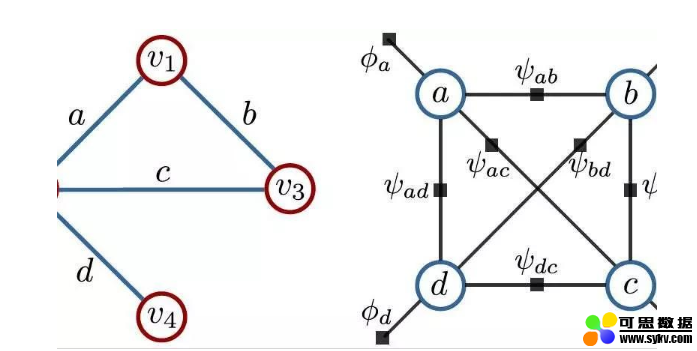
研究人员在工作中使用的示例拓扑(左)和概率图形模型(右)
室外的研究取得进展后,研究人员将相关结论被应用于室内机器人导航,因此,经过优化后的室内导航技术能够到达指定位置的路径上,找到能遇到较少的障碍和阻塞的通道,预测环境,规划路径,实现更强大的自主导航能力。
动态环境,表现出色
研究人员分别将未优化和优化后的导航技术机器人放在小型办公室,中型办公室,大型办公室和医院,尤其是在医院等对机器人效率至关重要的环境中,优化后的机器人表现十分出色。
Nardi说:“我们的研究表明,尽管导航系统的复杂性有所增加,但我们的方法会逐步引导机器人提供有关环境配置的准确预测,并利用这些知识沿较短的路径导航。”

研究人员表示,对于新型的机器人室内导航技术未来的研究方向,将尝试更复杂的动态环境,确保该技术能被灵活地应用于现实生活中。

时间:2019-10-20 00:07 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















