微课堂|第七篇工业机器人控制设定
第七期工业机器人
控制设定
新一期的微课堂
小编继续带您一起学习
运行时控制参数设定!
控制设定
机械手设定
--[机械手设定]用于设置机械手启动模式、系统IO、本体参数等;
--默认用户名、密码均为“admin”;
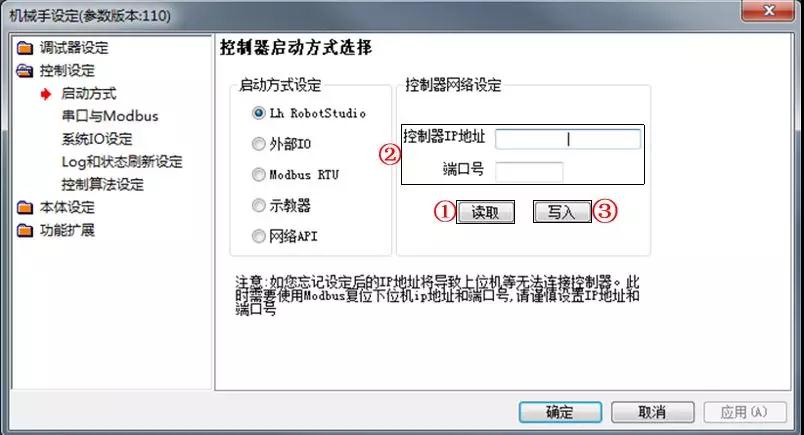
控制设定-启动方式
--只有在LH Robot Studio启动模式下,才可通过运行工具栏的按键运行程序;
--修改控制器IP时,需[读取]-修改IP-[写入]-[确定];
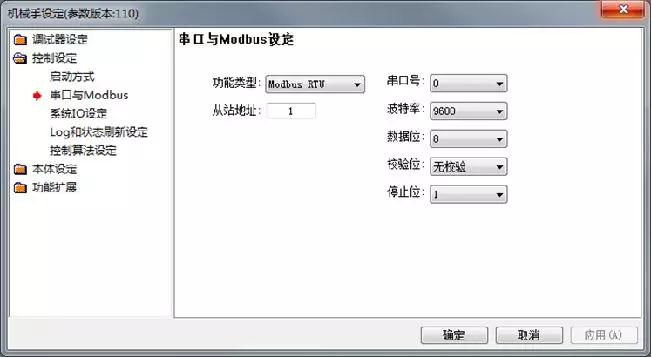
控制设定-串口与Modbus设定
--用于设定Modbus RTU通信、控制所用参数;
--Modbus RTU通信中串口号需为0;
--控制器在通信中作为从站,故从站地址不可为0;
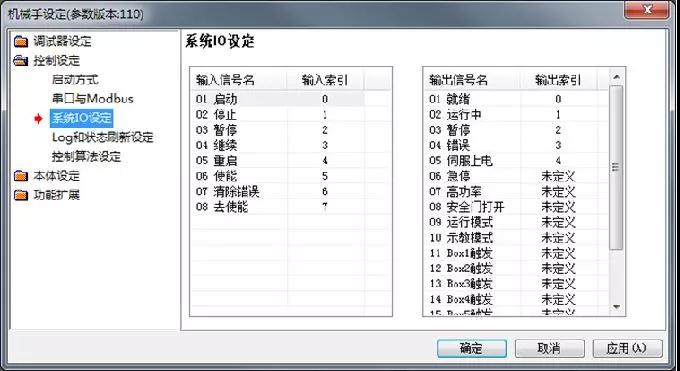
控制设定-系统IO
--设定外部IO启动模式下各输入、输出的功能;
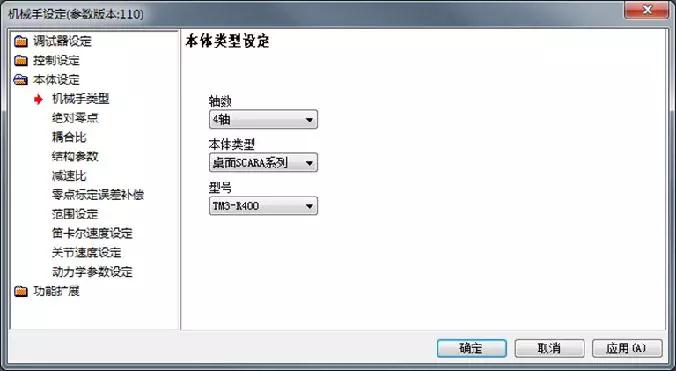
本体设定
本体设定
--本体设定部分用于设定机械手本体类型、绝对零点、机械手本体结构参数和速度参数等;
本体设定-绝对零点
--[绝对零点]界面用于在零点丢失时重新标定机械手零点;
--将机械手移至零点标定位后,进入[绝对零点];
系统更新
系统更新-软件版本号
--查看软件版本号需在正常连接状态控制器时进行;
系统更新
--系统更新完成后,需在[系统控制]中手动重启控制器;
命令窗口
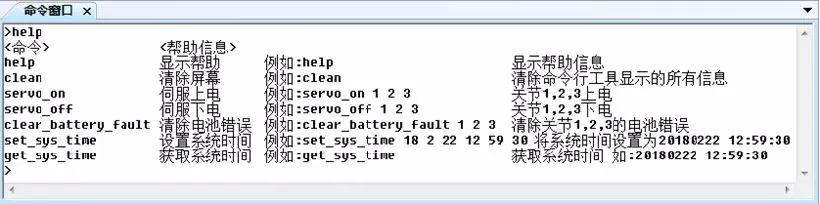
命令窗口
--[命令窗口]主要用于清除编码器电池电量低错误和修改系统时间;
IO启动
IO启动
--IO启动模式下,可通过各系统输入控制机械手程序运行、上下电、清除错误,控制器将通过系统输出表示当前状态;

--外部设备在通过IO进行控制前,需等待控制器“就绪”信号打开;
--系统输入信号生效条件均要求其他系统输入关闭,即同一时间仅可处理一个系统输入信号;

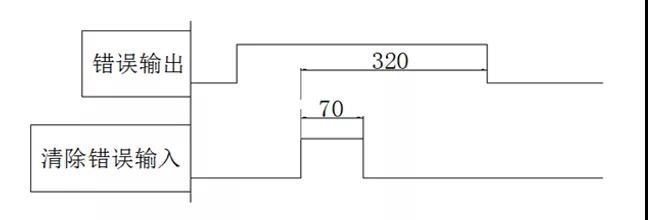
系统IO操作时序
--系统输入信号需保持至少100ms,才能保证系统输入稳定触发;

--控制器报警后,必须先清除错误,才可继续操作
Modbus RTU控制模式

--通过控制器面板上的RS232端口将外部设备与控制器连接;
--设定Modbus RTU启动模式和通信参数;
--确保[示教器]中处于自动模式;
Modbus RTU启动-输入寄存器
--外部设备可读取控制器的输入寄存器,来获取控制器当前状态;


时间:2019-06-20 23:49 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















