微课堂|第六篇工业机器人手动操作
第六期工业机器人手动操作
以及软件界面详解
新一期的微课堂
小编继续带您一起上
工业机器人实际操作课!
IO状态
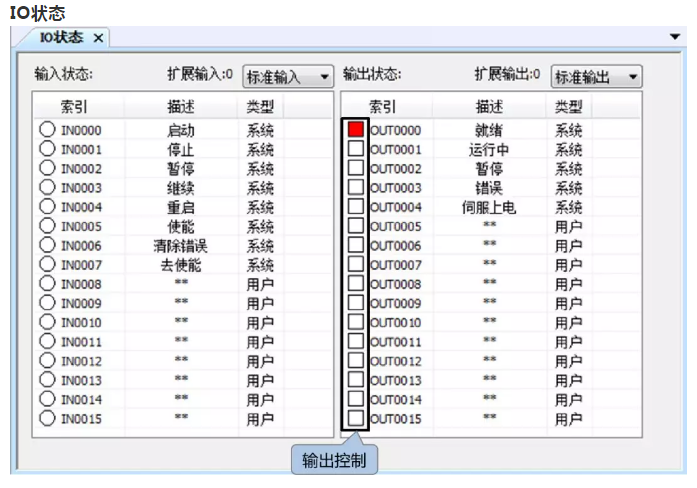
--IO状态窗口用于监控当前控制器所有输入和输出的当前状态,以及控制用户输出的状态
--单击输出指示灯,即可打开/关闭该输出端口;
坐标系与视觉标定
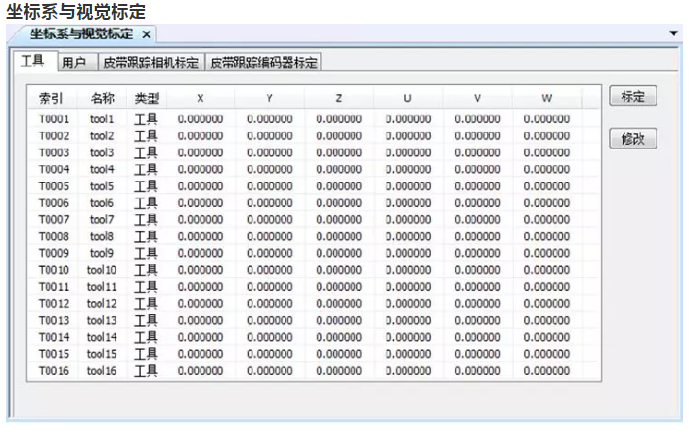
--[坐标系与视觉标定]界面用于修改和标定工具、用户坐标系;
--目前固定16个工具和用户坐标系;
坐标系与视觉标定-工具标定
--选择要标定的工具,点击[标定],根据标定流程完成工具标定;
--标定前,需确保工具末端与机械手外部有可用的参考点;
--示教点位时,确保示教器中未选择任何工具;
坐标系与视觉标定-用户坐标系标定
--选择要标定的用户坐标系,点击[标定],根据标定流程完成用户坐标系标定;
--标定前,需确保工具末端与用户坐标系上有可用的参考点;
--示教点位时,确保示教器中未选择任何用户,且选择了做为参考点的工具;
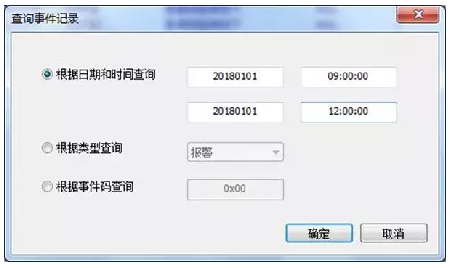
事件记录
--[事件记录]用于查看控制系统的历史报警、警告记录;
--[进入管理]后,即可删除报警记录;

--可各级报警类型、报警时间查询记录;
工程管理
--在工程视图的右键菜单或菜单栏的[工程]菜单打开工程管理功能;
--工程管理包含以下功能:新建工程、导入工程、导出工程和关闭工程;
--进行工程管理各操作时,需确保LH Robot Studio未连接机械手控制器;
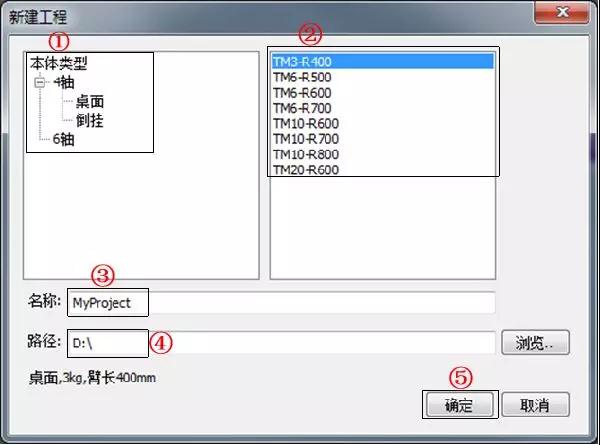
工程管理-新建/关闭工程
--工程名称不可有中文及特殊符号;
--工程新建完成后,将自动加载到工程视图中,并成为当前的活动工程;
--在工程视图中选中一已加载的工程,点击右键,在弹出菜单中点击【工程】-【关闭工程】,即可将此工程关闭;
--如将当前的活动工程关闭,则剩余工程中的第一个工程将自动变为活动工程;
工程管理-导入/导出工程
--导入工程可加载个人电脑中已存在的工程;
--双击工程配置文件,即可加载该工程;
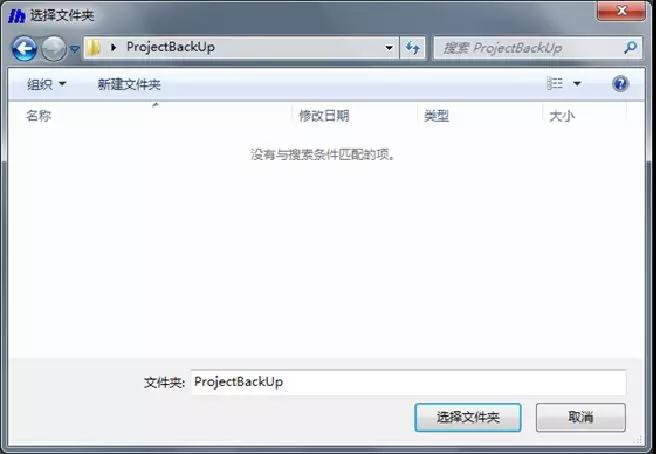
--导出工程可将已加载到LH Robot Studio的工程导出到指定位置;
工程管理-活动工程与工程属性
--LH Robot Studio可同时加载多个工程,但仅有一个活动工程;
--选择工程后,点击右键快捷菜单的[设为活动工程]或快捷按钮切换活动工程;
--[工程属性]可查看当前工程的文件路径、本体型号等信息;
工程管理-文件窗口
--双击工程视图中各文件名,即可打开对应的程序编辑窗口、点位文件窗口和打印信息窗口;
--在示教模式下,可在Points窗口中直接修改点位数据;
--程序中如使用了print打印指令,则打印结果将显示在打印信息窗口;
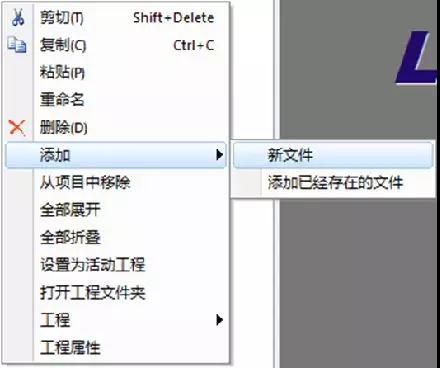
文件管理-添加文件
文件管理包括文件添加、文件移除和文件删除等功能;
--添加文件过程中的temp-文件为临时文件,设定文件名并保存后才会保存到工程文件夹中;
--添加已存在的文件时,只能添加当前工程文件夹中的程序文件;
文件管理-删除文件
--选择已添加的子程序文件,即可在右键快捷菜单中删除或移除子程序文件;
--主程序文件Main.lh不可移除、不可删除;
--被移除的文件不会被删除;
函数视图
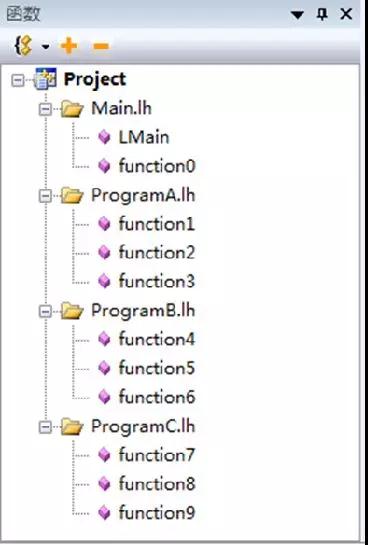
--查看程序文件中所有已编写的函数;
--双击函数名即可跳转到函数头位置;
--修改程序文件并保存后即自动刷新;
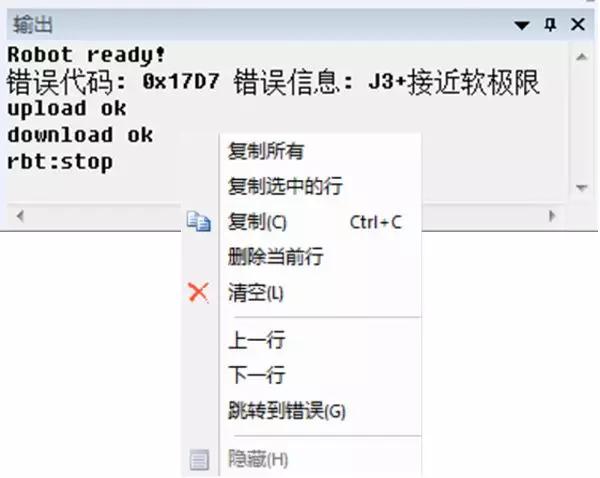
输出视图
--显示操作、程序运行过程中的提示信息、语法错误等信息;
--右键快捷菜单可对输出信息进行清空、删除、复制等操作;
--部分提示信息可双击跳转到报错位置或程序停止位置;
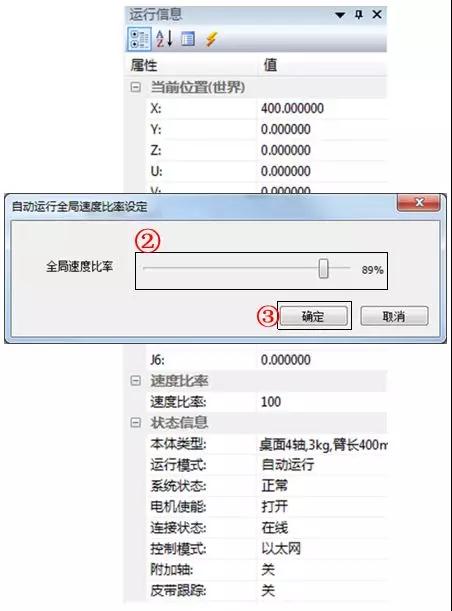
运行视图
--查看机械手实时关节、世界坐标值变化、当前状态、本体类型等信息;
--[自动运行全局速度比率]可设置自动运行时的速度百分比,与VELPCT指令所设百分比、速度变量所设百分比同时生效;
程序运行
--点击程序运行工具栏的各按钮,或[运行]菜单的各选项运行;
--程序停止后重新运行,程序将从主程序第一行开始运行;


时间:2019-06-20 23:48 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















