斯坦福大学造出狗型机器人,可以后空
镇上最近出现了一台四足机器人。波士顿动力公司(Boston dynamic)的狗型机器人为斯坦福大学(Stanford University)的本科生建造一个四足机器人提供了很好的范例。斯坦福大学将设计开源,目的是通过低成本的机器人技术鼓励进步。
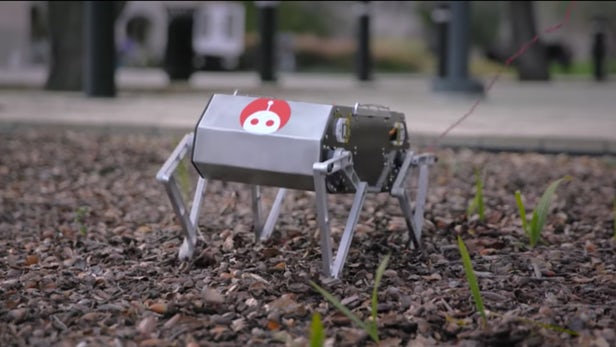
这个新机器人的名字很简单,叫做Doggo,它是斯坦福大学学生机器人俱乐部的极端机动性团队的产品,该团队致力于开发一种价格合理的机器人,可以相对轻松地对他进行复制。
研究小组指出,类似的机器人设计使用定制部件,成本高达数万美元,这就是为什么有时候制造一个尖端的机器人系统会超出许多研究人员的能力范围。而Doggo几乎完全是用现成的组件建造的,其成本甚至不到3000美元。它在发动机和外力传感器的帮助下完成各种动作,每秒进行8000次计算,以确定通过每根腿施加的力和扭矩。
机械工程专业的Nathan Kau说:“我们在研究中看到了其他的四足机器人,但它们并不是你可以带进自己的实验室,用于自己的项目。”我们希望斯坦福多哥成为一个开源机器人,你可以在相对较小的预算上建立自己。”
虽然它花费了两年的改进和试验和错误,但这一切都是值得的,现在Doggo机器人已经能够做出一系列令人印象深刻的动作来。它可以保持稳定的步态,在不平坦的地形上行走。它还可以执行团队称之为“标志性动作”的动作,一种跳跃的舞蹈式动作,当它仅依靠运动和移动的腿来创造视觉效果时,看起来就像是装了弹簧一样。
Doggo的跳跃技术给大家留下了最深刻的印象。他们发现,机器人能够跳到空中两英尺(60厘米)。通过一次又一次地调整软件,团队成员可以让它跳上3.5英尺(100厘米)的空中然后后空翻。

“我们希望提供一个任何人都可以建立的基线系统,”帕特里克·斯莱德说,他是航空航天研究生,也是极端机动性的导师。比如说,你想做搜索和救援工作,你可以给它装上传感器,在我们的顶部写下代码,让它爬上岩石堆或在洞穴中挖掘。或者是用胳膊捡东西,或者带着包裹。”
现在,他们致力于开发第二代Doggo,它将更大、更先进。

时间:2019-05-26 00:30 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















