移动机器人再获三项新专利,开启自
Omron Adept Technologies最近获得了三项移动机器人专利。每项专利都涉及不同的移动机器人解决方案,包括:运输车、作业管理系统(Enterprise Manager)和用于作业管理的自主导航车。

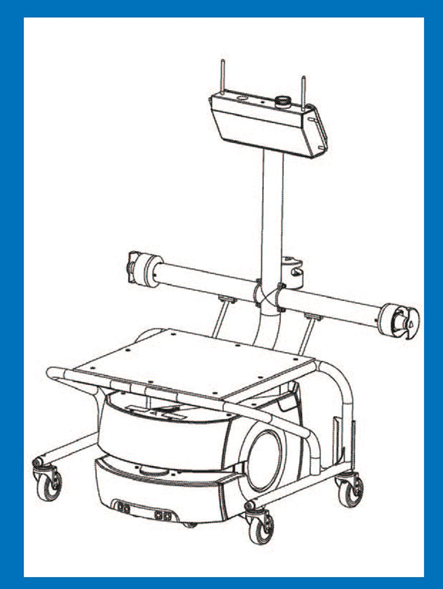
推车专利
推车专利(美国专利号10,168,711 B2)描述了一种由自主导航移动机器人执行的方法。该文件确定了机器人用于定位推车和定位自身的方法。
该方法的内容为:
首先移动到附近停放轮式推车的指定位置,检测并操纵机器人相对推车进入精确对准位置,并在到达精确对准位置后锁定到推车,然后将推车以滚动接合的方式与机器人锁定并移动到指定的第二个位置,最后解锁并从推车上分离。
作业管理系统专利
作业管理系统专利(美国专利号10,089,586)描述了一种在物理环境中在作业管理系统上处理作业请求的方法。系统自动确定新路径以避开静止和非静止障碍物,并自动将移动机器人驱动至作业位置。当移动机器人到达作业位置后,它将自动执行与该位置相关联的一个或多个作业操作。

作为专利申请程序的参与者,Matt Vestal解释了该项目被称为自主导航车发展过程中重要转折点的原因。“这个项目主要源于客户的需求,他们想为车队内的不同机器人分配不同的工作并让合适的软件来实现这一目的,”
Matt说。“作业管理系统可以让客户将作业自动分配给适当的机器人。它为客户提供了巨大的价值,因为它将客户与移动车队的联系集中到了一个点上。而在此之前,客户需要不断与车队中的每个机器人进行通信。换句话说,客户需要记住并纠正车队中每个机器人的位置、不断检查电池状态或检查移动方向。只有在进行所有这些操作之后,客户才能做出决定并选择最合适的工作。
Enterprise Manager的出现,大大改变了现状,它可以告诉机器人从一个地方取走货物,然后在另一个地方将其放下等等,这一切都是自动完成的。系统仅会选择能够完成工作的机器人,并会根据工作的不同要求(例如,不同的输送器顶面)进行区分。因此,客户可以大大缩短实施时间并简化所涉及的通信工作。”
实用性专利
实用性专利(美国专利号9,592,609)描述了一种用于在含有静止和非静止障碍物的物理环境中处理作业分配的移动机器人,其描述了机器人处理作业分配的能力。
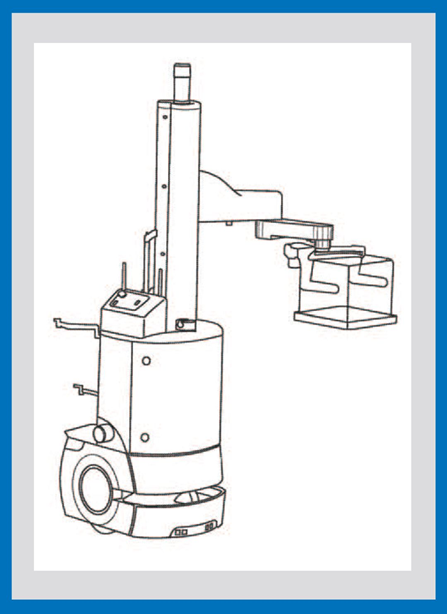
移动机器人通常由机器人基座(包括定义物理环境平面图的地图)、机器人基座控制器和机载导航系统组成。作业分配可能包括由地图定义的作业位置、由地图定义的作业操作,或者作业位置和作业操作这两者。该解决方案实现了机器人的完全自主操作,并为许多不同的应用提供有关自主机器人使用的信息。

实用性专利和作业管理系统专利是互补的关系。前者描述的是硬件,后者描述的是软件。这三项专利足以证明欧姆龙已开发出新一代的自主导航车,这些自主导航车技术先进,易于安装、部署和操作,能够在动态环境中导航。它们所使用的方法通过提高可追溯性、生产力和支持精益生产来为客户提供巨大价值。从商业角度来看,创新的知识产权为欧姆龙提供了竞争优势。
截至目前,OMRON Adept Technologies已拥有18项授权专利:其中8项涉及固定型机器人,10项涉及移动机器人。此外,目前还有3个已公开的应用和4个开发中的应用,因此这一数字仍将继续增长。

时间:2019-05-10 23:18 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















