哈佛大学的研究人员让kirigani机器人变得
去年年初,来自哈佛大学约翰·保尔森工程与应用科学学院(SEAS)的一个团队发现了一个蛇形软件机器人,它利用日本古代剪纸艺术kirigami来推动自己。近期,研究人员做了一些调整使得机器人在速度和精度上都得到了提升。该团队的研究成果发表在“ 美国国家科学院院刊”上。
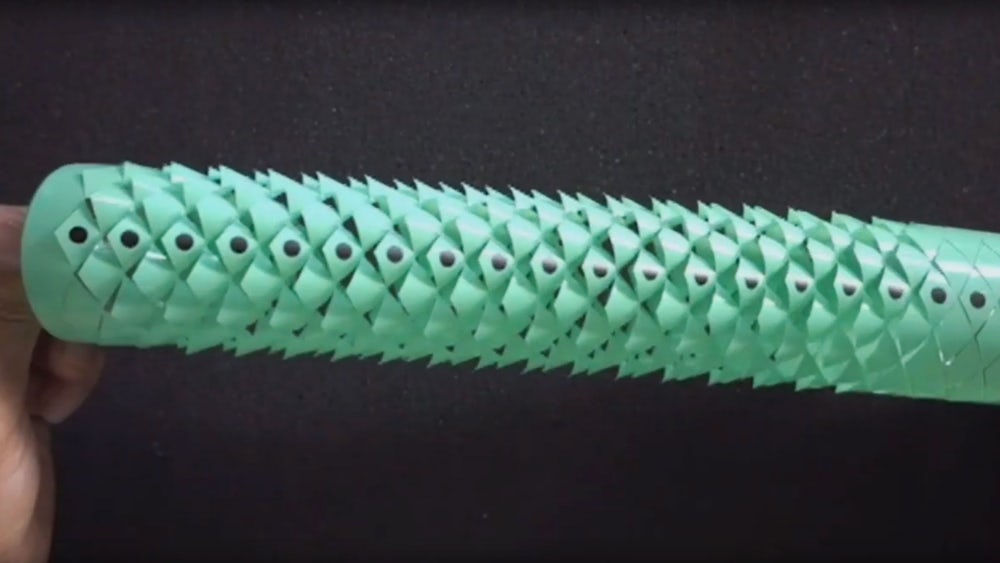
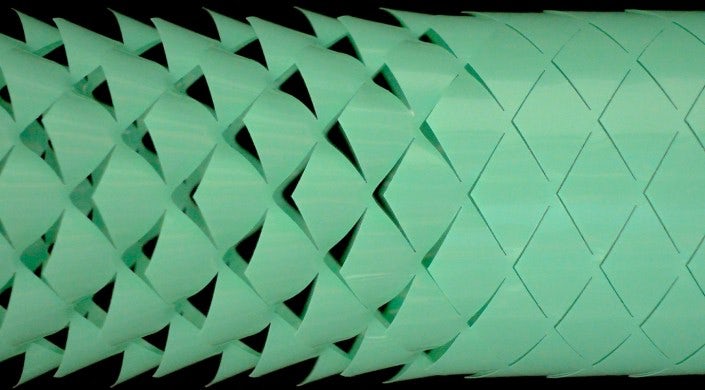
该团队的原始机器人是包含一个围绕弹性体执行器的扁平kirigami片,其“鳞片”在机器人拉伸的同时在其身体部位出现。通过改变鳞片切割的大小并将片材卷成圆柱体,两端通过驱动器施加力,研究人员能够对弹出长度施加更大的控制。
“通过借鉴相变材料的想法并将它们应用于基于kirigami的材料,我们证明了弹出和不变形可以同时在圆柱上共存,” Katia Bertoldi,William和Ami Kuan Danoff教授说,“通过简单地结合切割和曲率,我们可以编写非常不同的行为。”
最新的研究成果是使机器人比其前身更快地移动,并且可以更精确地定向。研究人员相信,有朝一日这样的机器人可以用来探索其他机器人难以操纵且较为复杂的环境,或者用于医疗方向,执行腹腔镜等等操作。为实现这些目标,该团队希望通过开发逆向设计模型来创建更复杂的变形。

时间:2019-04-28 23:42 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章















