微课堂第二篇,工业机器人术语详解
灵猴第二期工业机器人产品知识
更!新!啦!
新一期的微课堂
小编带您一起学习
SCARA工业机器人专业术语!
定位精度与标准循环时间

左手臂姿态 右手臂姿态
定位精度测量方法:分别以左手姿态、右手姿态运动到同一个点,测量两次运动停止后机械手末端的实际位置,比较两点之间的误差范围。这个误差范围就是定位精度。

标准循环时间:用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
SCARA机器人坐标系
笛卡尔坐标
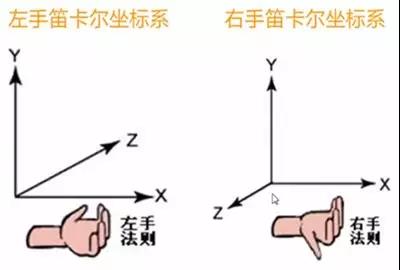
笛卡尔直角坐标系:两条数轴互相垂直的笛卡尔坐标系;包括左手笛卡尔坐标系和右手笛卡尔坐标系两种。LinkHou SCARA机器人笛卡尔直角坐标系遵循右手笛卡尔坐标系,以三维数据描述机器人末端在空间的位置
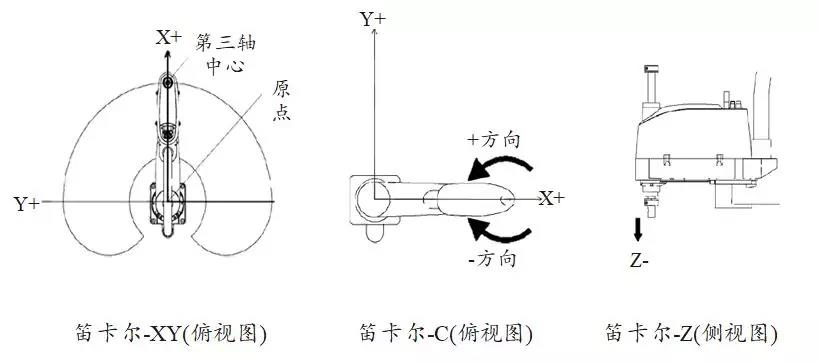
关节坐标
关节坐标系:每个轴相对原点位置的绝对角度。包含三个旋转关节
(J1,J2,J4,俯视逆时针旋转为正方向,顺时针负方向)和一个个移动关节(J3,测试上为正,下为负)。
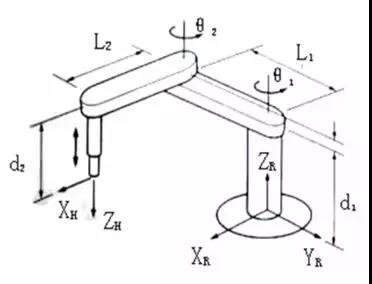
世界坐标系
世界坐标系:以机器人基座水平中心为XY原点,Z原点处于基座最低端,依照右手定则建立xy-z三维坐标系统。
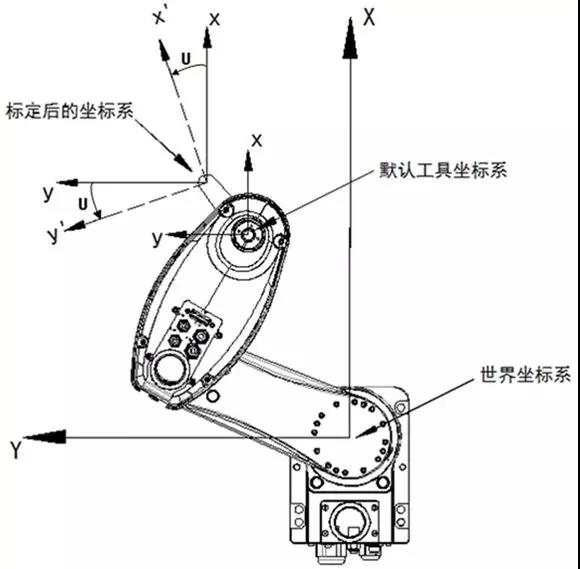
用户坐标系建立
一:手动添加用户坐标系
将已知的用户坐标系手动输入至相应的位置
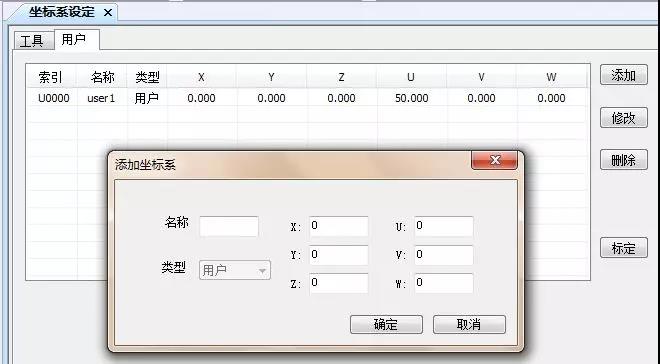
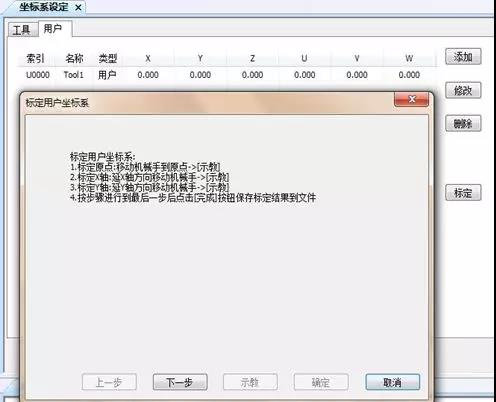
二:三点法标定用户坐标
零点--标定
SCARA零点与真实零点的接近程度,影响机器人系统的定位精度,决定机器人应用范围。
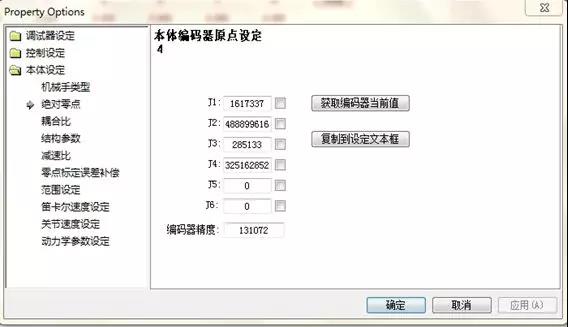
实施步骤
工具栏——项目——机械手设定——用户登录(密码:admin)——本体设定——绝对零点——将需要标零点的轴勾选上——获取编码器当前值——复制到当前文本框——应用——确定

时间:2019-04-24 14:19 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















