仙知常见FAQ集(六)
单激光导航和双激光导航有什么区别?为什么双激光的激光雷达安装在两个对角上?
单激光雷达仅能扫描到机器人前面的区域,当装载了货物之后便无法看到车身后面的区域;双激光雷达360°无死角覆盖,前面的激光负责定位,后面的激光负责避障安全性更高。
为什么双激光的激光雷达要安装在两个对角上?
激光雷达对角设计可将激光在车四周无死角覆盖,增加倒车、转向的安全性。
AMB无人搬运底盘所装载的激光雷达距离是多少?超过该距离怎么解决?
一般情况下,装载的激光扫描距离是30m,满足基本使用需求;如有特殊情况可以选配更远距离(如60m)的激光。
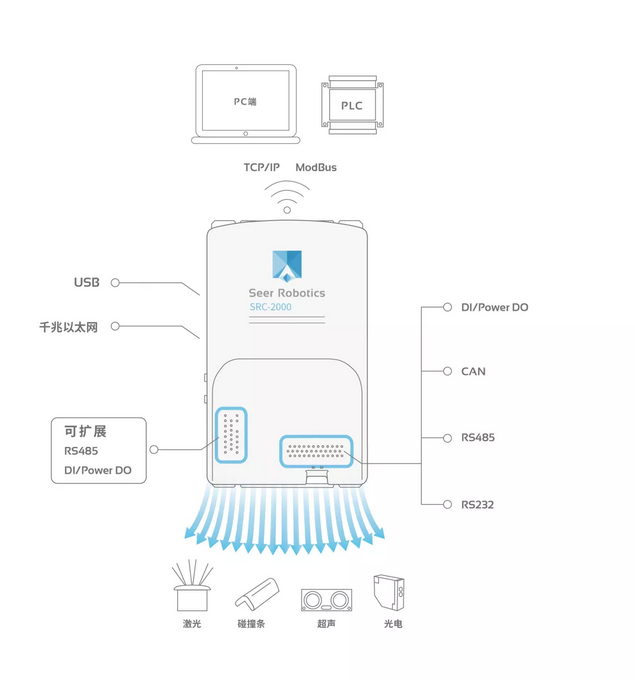
RoboRoute提供的HTTP接口是如何实现与我们用户的MES、WMS系统无缝对接的?
实现无缝对接的方式有两种:一种是用户的MES、WMS系统来调问仙知的web API;一种方式是仙知开发一个模块来读取用户的MES、WMS系统。
当AMB无人搬运机器人所执行的工作任务需要跨楼层或所处环境网络状况较差应该怎么办?
当出现这种情况是,一般推荐用户选购“车载无线客户端”配件,可实现多AP无缝漫游。
当使用车载无线客户端与局域网同时并用时,会有存在网络延迟吗?又是如何避免车载无线客户端与局域网两个网络频繁切换的?
网络都会存在延迟这个是肯定的,使用车载无线客户端之后会有一定的延迟,延迟是毫秒级别的,不会影响到机器人的正常工作。为了避免两者频繁切换,会设立一个阈值来避免这种情况的发生。

时间:2019-04-15 23:24 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















