双臂遥操作的机械手抓取在实际场景中
双臂遥操作
首先简要介绍一下我们的双臂遥操作是基于:
用户端:虚拟现实设备(VR)+可穿戴外骨骼设备(Exo-Skeleton)
机器人端:视觉设备(LiDAR+Point Grey Camera+Kinect)+带力反馈的关节驱动器
外骨骼设备记录操作人员的双臂+手指的运动轨迹,进而传输给机器人进行运动控制,而机器人本身则给予外骨骼设备一定的信息反馈如:机器人受外界碰撞的力反馈与各关节的极限运动位置等。同时,通过用户端的虚拟现实设备和机器人端的视觉设备,操作人员共享机器人端的视觉情况,相关如下图:
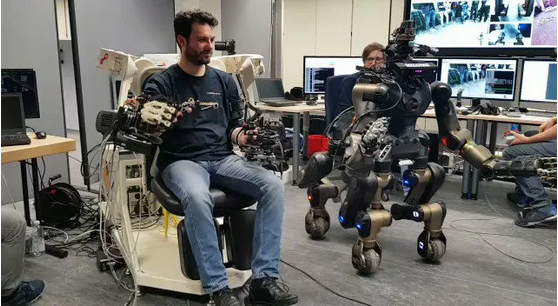
图为操作人员穿戴上身外骨骼

VR设备对Centuaro机器人进行遥操作
我们做双臂遥操作的动机是:面对复杂、多变的人类生活以及灾后救援环境,现阶段机器人自主决策层面的AI是远远不够用的。因此,整体机器人的操作权限移归人类(驾驶员)所有,而被控制的机器人只是具体动作的执行者,极其适合灾后救援等不适合人类进入的场景应用。
装上双手的Centauro机器人
Centauro机器人在这里是需要有相应的手部抓取和操作任务的,因此双臂末端安装了相应的机械手,如下图:

安装不同原理机械手的Centaruo机器人
因为基于现阶段的技术水平,机械手设计缺乏通用的解决方案,所以我们在这里安装了不同原理的机械手,以适应多样的抓取需求:
右手是偏向全驱动方案的雄克灵巧手(Schunk Hand)——这是一款来自德国雄克公司的商用机械手,售价55000欧元,其显著的特点是近乎全驱动的方案能够几乎复制所有人手的抓取动作,但缺点也是十分明显:抓取的力度不够大,同时刚性的关节造成其在面对外界碰撞时十分容易损坏。基于这样的特点,雄克灵巧手的定位是进行精巧且低负载的抓取操作。
左手是基于欠驱动方案的HERI II Hand——这是我们部门自行设计的机械手,因为欠驱动自由度缺失的缘故,无法实现像雄克灵巧手一般的精巧操作,不过另一方面欠驱动的特性带来了非常好的鲁棒性:即HERI II Hand的定位是进行较为强有力、且受冲击较大的抓取操作。
相关DEMO
作者在这里想要展示的Demo,主要是一个双臂协同操作以及展现抓取力的应用,其中包括:
▶双臂协同操作电钻,进行定点位置钻孔
▶单臂抓取空中电源座,另一臂连接电源
▶单臂抓取并旋转螺钉,另一臂手提锁链,协同操作锁紧锁链
▶单臂打开基座上的电源盖,另一臂连接电源
▶HERI II Hand一个5kg负载的末端抓取
双臂协同操作与抓取力
相关项目心得体会
最后在这里分享几点作者实际参与此项目的心得体会:
老生常谈,机械手目前缺乏通用的设计解决方案。之前提到,我们机器人的右手使用了雄克机械手,55000元的售价,几乎是目前你可能能买到最好的机械手,但全驱动的方案带来的刚性关节,在实际应用时有如下两个弊端:
1. 抗冲击和碰撞能力不如左手基于欠驱动方案的HERI II Hand,手指的关节硬件层面非常容易损坏,对机械臂末端整体的运动规划容错率要求很高;
2. 刚性关节的机械手指在接近质量较轻的被抓物体时,经常发生手指将物体“推开”的现象,造成抓取的失败,对机械臂末端的运动规划和相应的视觉精度要求极高;
而以上两点,对于实际、开放与多变的环境(非事先规划好),较难做到。
外骨骼遥操作+人眼视觉+实际机器人机械臂, 这套方案的初衷很好,但在实际操作中发现这三块系统的累积误差带来的负面影响太大了,即机器人的机械臂需要执行一些精密操作的时候,太多和太大的传递误差和超调。因此带来了正如上文Demo中那样——双臂操作耗时长、不精准且不够稳定。所以作者觉得:
1.决策层的AI归操作人员所控是可行的,但是较底层的路径和运动规划得靠机器人去完成,且需做到快速和精准实时规划;
2. 外骨骼本体+机器人本体的关节驱动器的控制和反馈精度还需要极大提高。
以上这两点做好,也是非常不容易的,前者的快速精准实时规划其实很难,后者需要极大的工程量和。
最后一点是对欧盟项目的体会:欧洲机器人的项目太注重应用现有的技术去解决实际问题了,项目的目标定的非常接地气,感觉恨不得立马就能带来经济价值,和美国相比就是保守和创造能力不足,但真心觉得工程技术上其实差距没那么大。好处自然是能够快速去解决实际工业生产或者灾后救援的问题;坏处就是技术理念太过保守,在创造力上远不如美国,也不够吸引人眼球,长远发展来看是有悖于科研的初衷的。

时间:2019-03-05 21:13 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















