带你玩转机器人视觉分拣系统:
【硬核】
带你玩转机器人视觉分拣系统
在线动态智能识别跟随抓取
机器视觉系统原理是运用机器代替人眼来做测量和判断,通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作,它综合了光学、机械、电子、计算机软硬件等方面的技术,通过运用计算机、图像处理、模式识别、信号处理、光机电一体化等,完成对目标的定位、识别以及跟踪。
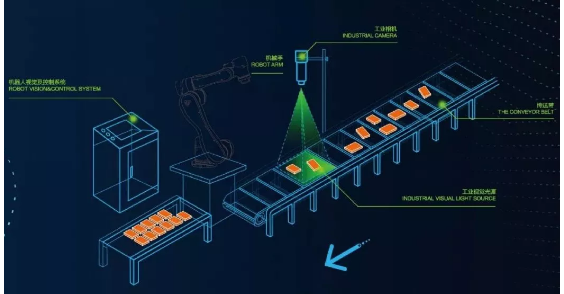
(工业机器人视觉系统)
机器视觉系统优势
机器视觉系统能够提升生产的柔性和自动化程度,尤其在一些不适于人工作业的危险工作环境或人工视觉难以满足要求的场合,机器视觉充分体现了替代人工视觉的优越性;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率,而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术,可以应对高速的生产线作业,进行产品的测量、引导、检测、和识别,并能保质保量的完成生产任务。
(在线动态智能识别跟随抓取)
在线动态智能识别跟随抓取
分拣抓取是工业生产中的一个重要环节,相对于传统的人工方式,显然无法满足工业4.0时代,工业机器人引入机器视觉系统已经成为这一生产领域的主流。
机器视觉系统是一种比较复杂的系统,因为大多数系统监控对象都是运动物体,系统与运动物体的匹配和协调动作尤为重要,所以给系统各部分的动作时间和处理速度带来了严格的要求;针对在线动态智能识别跟随抓取,需要综合动态目标抓取策略、传送带速度控制策略,基于位置预测的传送带上物体拦截式的抓取方法,还要考虑系统的运行速度和图像的处理速度、以及摄像机使用、检测目标尺寸、检测目标有无缺陷、视野范围、分辨率大小、对比度高低等统筹运用。

(电姆自主开发视觉识别系统)
电姆自主知识产权视觉识别系统
电姆自主研发视觉识别系统的视觉算法与软件,不断优化,开发了在线动态智能识别跟随抓取这项系统硬核,实现了机器视觉对工件种类的智能识别并引导机器人精准抓取,在生产分拣环境中,使电姆视觉识别系统能够快速识别目标并作出迅速反应,并针对工件的不同状态做出抓取、按设定要求摆放等针对性操作。
开发技术围城
开发在线动态智能识别跟随抓取的技术围城,主要有:编写图像识别算法,算法包括图像增强、动态阈值分割、直方图计算、形态学变换、连通域提取、区域填充、圆度和面积为条件的区域筛选、最小外接矩形的求取、图像计数、区域联合;利用该图像识别算法对采集的图像识别工件中心点像素坐标及作业区域的角度信息,并由空间坐标系的坐标转换原理转换到机器人世界坐标;通过对编码器脉冲数进行处理,从而对工件进行动态跟随并将数据发送给工业机器人;工件进入抓取区域时,机器人动态抓取工件并以固定姿态进行生产作业,并在MFC上完成系统逻辑架构及界面显示。

开发应用优势
工业机器人引入在线动态智能识别跟随抓取带来的直接体现,能够使机器人在生产流水线上快速、持续、准确地抓取待分拣物质,还可以定位引导机器人上下料、传送带跟踪、分拣等应用。对玻璃、金属、陶瓷、塑料、木质、布料、皮革、食品等各类产品均可识别。
(实际生产使用案例)
电姆视觉识别系统特点
电姆机器人视觉识别系统,经过长期的研发和技术攻关,可运用于扫码识别,OCR识别,缺陷检测等领域的图像识别,实现人工作业的自动化,并具备以下技术特点:
1、非接触测量,对于观测者与被观测者都不会产生任何损伤,从而提高系统的可靠性。
2、具有较宽的光谱响应范围,例如使用人眼看不见的红外测量,扩展了人眼的视觉范围。
3、在生产线上,人来做此类测量和判断会因疲劳、个人之间的差异等产生误差和错误,而机器视觉则可以长时间地作测量、分析和识别任务。
(SCARA四轴机器人)
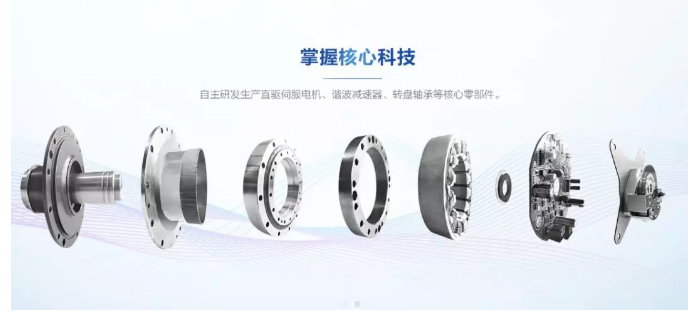
(电姆机器人自主研发,掌握核心科技,不断创新)
电姆机器人始终以“自主研发、科技创新”为发展理念,先后研发了直驱伺服电机、谐波减速器、谐波减速器专用轴承等核心零部件,及驱动模块软件、机器人视觉识别系统等自主知识产权产品。 2015年6月,中国科学技术部查新咨询中心认定“电姆机器人项目”为行业领先水平,通过核心技术的自主研发生产,有效做到工业机器人成本控制和即时服务,致力于为中小型企业提供高性价比的机器人产品与定制化应用解决方案。

时间:2019-03-01 23:32 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















