为解决生产制造一线的课题,试图扩展机器人的

近年来,无论是在生产制造一线还是供应链乃至医疗现场中,机器人活跃在我们生活方方面面。机器人与人类的关系变得比从前更加紧密,甚至引发了人类未来的工作可能会被机器人取代的讨论。欧姆龙通过最尖端的机器人技术开发,扩展机器人的可能性,以建立机器人可在各种场合活跃的“人与机械相互融合的社会”作为目标。这是一个机械激发人类潜能,使人类更具创造性地工作和生活的社会。
构想这一近未来形态并进行技术开发的便是OMRONSINICX Corporation(下称OSX)。长年挑战机器手研究的Felix von Drigalski(下称Felix)就是这家公司里的一员,他们参加了2018年10月举办的机器人技术竞赛“World Robot Challenge(下称WRC)”的生产制造项目。
针对在机器人研究方面的想法和对参加WRC比赛的期望,我们对Felix进行了采访。
正因为怕麻烦,才挑战机器人开发
——首先能否谈一下是什么样的契机让你立志研究机器人的呢?
Felix:在科幻作品中,20世纪50年代以前就有机器人登场了,那时我还没出生。也就是说,从我记事开始,就已经理所当然地认为“我长大后机器人将代替人类来工作”。比如洗衣服、叠衣服这些人类感到很麻烦的事,应该已经成为机器人的工作了……
——但很遗憾现实并不是这样。
Felix:是啊,所以我立志研究机器人。而且我是个很怕麻烦的人(笑)。我希望机器人能代替我们工作,因此开始了机器人研究。

Felix von Drigalski
——你主要研究的是机器手是吧?
Felix:机器人的手远远不及人类,机器人难以判断“是否握住了”、“是不是快要脱落了”等情况。金属等坚硬的东西还能做到,布料等柔软的东西就不行了。即使安装上摄像头,利用最尖端的图像处理技术,也尚未开发出能够正确识别被团得皱巴巴的布料并想象其整体形状的技术。
——与机器手相比,人类的手又是什么样的呢?
Felix:人的手指和手掌上都有大量的传感器官,指尖富有弹性,可以从多角度识别目前哪个部位正在接触物体,压力和摩擦力是怎样的等各种情况,还能结合通过眼睛等其他器官获得的信息,识别目前抓握的是什么物体。我的研究目标就是让机器人的手尽可能向人手靠近。

机器人的手如果能接近人类的手,机器人就能胜任多种操作
——你拥有国内外企业和研究所的工作经验,是什么原因让您决定就职于欧姆龙这家日本企业的研究机构呢?
Felix:我曾不止一次觉得比起基础性研究,自己更适合应用型研究。于是决定不仅要做研究,还要将研究与商业接轨,并在社会中将其实现。就在这时,OSX向我抛出了橄榄枝。加入OSX后发现这里可以非常自由地做研究。我能决定独立的研究课题,自己思考并行动,也可以参加学会并发表论文。另外,和我一起在OSX工作的研究员和欧姆龙的技术人员都十分优秀,能受到良好的影响。我研究的课题和OSX这个组织的发展方向也很契合。最重要的是我非常认同欧姆龙持续通过技术和事业解决社会课题的理念。在这里每一天都过得很充实。
机器人能够胜任的工作将会越来越多

——让我们再回到机器人的话题。我在很多不同的场合都听到过“提高机器人的能力极其困难”这样的意见。
Felix:最大的问题在于,“现在的机器人无法完全识别人类所看到的世界”。人类可以把握情况,思考想做什么,然后尝试行动,并确认是否成功,但是机器人却做不到这一点。要想让机器人学习,需要人类告诉机器人失败在哪里,而且和指导人类的方法不同,难度非常大。
——你认为工业用机器人未来将进化到什么水平?
Felix:在体能方面,机器人在某些地方可以超过人类,但是在智能方面,现在还在不断摸索和试错的阶段。目前的工业用机器人,在特定的环境下进行预设好的动作时,可以比人类更高速且正确地进行操作。但是它们无法理解抽象的命令,一旦环境发生改变就无法应对。不过,在不久的将来,机器人的能力范围将越来越广,那么它们能胜任的工作也就越来越多,这一点是可以肯定的。到那时,我认为人类和机器人的关系就会改变,人类将担任监督机器人的角色。希望我们的研究能为欧姆龙实现人机融合的未来这一目标发挥更大的作用。
参与竞赛,加速机器人的技术开发
——请谈谈本次参加WRC比赛的情况。
Felix:我本次报名参加的是生产制造类别,挑战的课题可以说是以现在的机器人技术不可能实现的高难度课题。
比赛内容是组装模具、螺丝、橡胶圈等多个零部件,对于安装到正确位置并拧上螺丝这一系列操作,机器人很难做到非常精准。零部件的装配※等对于机器人来说是难度很高的精细操作,如果真能实现,将加速机器人的技术开发,我觉得这是一项重大的挑战。
※装配是指将零部件和零部件拼合在一起。因为要将零部件无缝拼合,因此需要非常细致的手工操作。
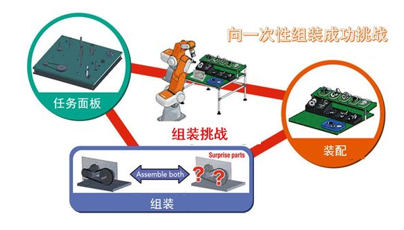
World Robot Challenge产品制造项目概要
——此次OSX不是单独参赛,而是与大阪大学、产业技术综合研究所、商汤科技日本 (SenseTimeJapan) 等组队参赛吧。
Felix:与研究各种不同课题的大学、企业、团体进行合作也是参加WRC比赛的一大意义。通过知识见解和技术的组合和互补,能够实现单一公司无法实现的具有更高难度水平的技术。我们每周安排两次“核心时间”,和远隔万里的伙伴们通过互联网随时交流,团队运转良好。听说此次参赛阵容是16个团队,竞争对手有15个团队,我们目标肯定是拿冠军。

时间:2018-12-19 22:08 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















