4步教你如何选工业机器人视觉【附厂商名单】
机器视觉软件是检测系统中的智能部分,也是最核心的部分。那么视觉系统究竟是何种构造,我们又该如何选择呢?今天就让小编带领大家走进“视觉系统”的世界。
视觉系统的构成
典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分。
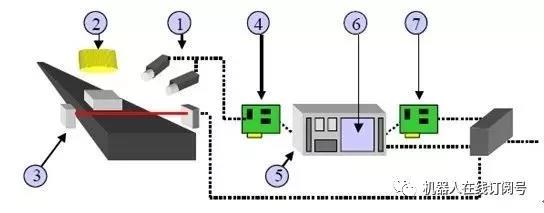
01.工业相机与工业镜头
这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。

02.光源
作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用,各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。
03.传感器
通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态,告知图像传感器进行正确的采集。
04.图像采集卡
通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
05.PC平台
电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。

06.视觉处理软件
机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。常见的机器视觉软件以C/C++图像库,ActiveX控件,图形式编程环境等形式出现,可以是专用功能的(比如仅仅用于LCD检测,BGA检测,模版对准等),也可以是通用目的的(包括定位、测量、条码/字符识别、斑点检测等)。
07.控制单元
一旦视觉软件完成图像分析(除非仅用于监控),紧接着需要和外部单元进行通信以完成对生产过程的控制。简单的控制可以直接利用部分图像采集卡自带的I/O,相对复杂的逻辑/运动控制则必须依靠附加可编程逻辑控制单元/运动控制卡来实现必要的动作。
视觉常见问题解答
1.工业相机的分辨率是如何定义的?
分辨率是相机最基本的参数,由相机所采用的芯片分辨率决定,是芯片靶面排列的像元数量。通常面阵相机的分辨率用水平和垂直分辨率两个数字表示。
如:1920(H)x1080(V),前面的数字表示每行的像元数量,即共有1920个像元,后面的数字表示像元的行数,即1080行。现在相机的分辨率通常表示多少K,如1K(1024),2K(2048),3K(4096)等。在采集图像时,相机的分辨率对图像质量有很大的影响。在对同样大的视场(景物范围)成像时,分辨率越高,对细节的展示越明显。

2.工业相机的帧频和行频是什么意思?
相机的帧频/行频表示相机采集图像的频率,通常面阵相机用帧频表示,单位fps(Frame Per second),如30fps,表示相机在1秒钟内最多能采集30帧图像;线阵相机通常用行频便是单位KHz,如12KHz表示相机在1秒钟内最多能采集12000行图像数据。速度是相机的重要参数。在实际应用中很多时候需要对运动物体成像。相机的速度需要满足一定要求,才能清晰准确的对物体成像。相机的帧频和行频首先受到芯片的帧频和行频的影响,芯片的设计最高速度则主要是由芯片所能承受的最高时钟决定。
3.工业相机的噪声是什么意思?
工业相机的噪声是指成像过程中不希望被采集到的,实际成像目标外的信号。根据欧洲相机测试标准EMVA1288中,定义的相机中的噪声从总体上可分为两类:一类是由有效信号带来的符合泊松分布的统计涨落噪声,也叫散粒噪声(shot noise),这种噪声对任何相机都是相同的,不可避免,尤其确定的计算公式。(就是:噪声的平方=信号的均值)。第二类是相机自身固有的与信号无关的噪声,它是由图像传感器读出电路、相机信号处理与放大电路等带来的噪声,每台相机的固有噪声都不一样。另外,对数字相机来说,对视频信号进行模拟转换时会产生量化噪声,量化位数越高,噪声越低。
4.工业相机的信噪比什么意思?
相机的信噪比定义为图像中信号与噪声的比值(有效信号平均灰度值与噪声均方根的比值),代表了图像的质量,图像信噪比越高,图像质量越好。

5.工业相机中动态范围是什么意思?
相机的动态范围表明相机探测光信号的范围,动态范围可用两种方法来界定,一种是光学动态范围,指饱和时最大光强与等价于噪声输出的光强的比值,由芯片的特性决定。另一种是电子动态范围,他指饱和电压和噪声电压之间的比值。对于固定相机其动态范围是一个定值。不随外界条件变化而变化。相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值:动态范围=光敏元的满阱容量/等效噪声信号动态范围可用倍数、dB或Bit等方式来表示。动态范围大,则相机对不同的光照强度有更强的适应能力。
6.如何选择线阵相机?
1.计算分辨率:幅宽除以最小检测精度得出每行需要的像素。
2.检测精度:幅宽除以像素得出实际检测精度。
3.扫描行数:每秒运动速度长度除以精度得出每秒扫描行数。
根据以上计算结果选择线阵相机举例如下:
如幅宽为1600毫米、精度1毫米、运动速度22000mm/s相机:1600/1=1600像素最少2000像素,选定为2k相机1600/2048=0.8实际精度22000mm/0.8mm=27.5KHz应选定相机为2048像素28kHz相机。
如何选择视觉系统
1.考虑各种变化
人类的眼睛和大脑可以在不同的条件下识别目标,但是机器视觉系统就不是这样多才多艺了,它只能按程序编写的任务来工作。了解你的系统能看到什么和不能看到什么能帮助你避免失败(例如将好的部件认为是坏的)或其它检测错误。一般要考虑的包括部件颜色、周围光线、焦点、部件的位置和方向和背景颜色的大变化。

2.正确选择软件
机器视觉软件是检测系统中的智能部分,也是最核心的部分。软件的选择决定了你编写调试检测程序的时间、检测操作的性能等等。
机器视觉提供了图形化编程界面 (通常称为“Point&Click”) 通常比其他编程语言(例如 VisualC++)容易,但是在你需要一些特殊的特征或功能时有一定的局限性。基于代码的软件包,尽管非常困难和需要编码经验,但在编写复杂的特殊应用检测算法具备更大的灵活性。一些机器视觉软件同时提供了图形化和基于代码的编程环境,提供两方面最好的特征,提供了很多灵活性,满足不同的应用需求。
3.通信和记录数据
机器视觉系统的总目标是通过区分好和坏的部件来实现质量检测。为了实现这一功能,这个系统需要与生产流水线通信,这样才可以在发现坏的部件时做某种动作。通常这些动作是通过数字 I/O 板,这些板与制造流水线中的 PLC相连,这样坏的部件就可以跟好的部件分离。
例如,机器视觉系统可以与网络连接,这样就可以将数据传送给数据库,用于记录数据以及让质量控制员分析为什么会出现废品。在这一步认真考虑将有助于将机器视觉系统无缝与生产流水线结合起来。需要考虑的问题是:
-
使用了什么类型的 PLC,它的接口如何?
-
需要什么类型的信号?
-
现在使用或必须使用什么类型的网络?
-
在网络上传送的文件格式是什么?通常使用 RS-232端口与数据库通信,来实现对数据的纪录。
为以后做准备:当你为机器视觉系统选择部件时,时刻记住未来的生产所需和有可能发生的变动。这些将直接影响你的机器视觉软硬件是否容易更改来满足以后新的任务。提前的准备将不仅仅节约你的时间,而且通过在将来重用现有的检测任务可以降低整个系统的价格。机器视觉系统的性能由最差的部分决定(就像一个木桶的容量由最短的一个木块决定),精度则由它能获取的信息决定。花时间和精力合理配置系统就可以建造一个零故障和有弹性的视觉检测系统。
4.选择硬件的三点须知
一套机器视觉系统的性能与它的部件密切相关。在选择的过程中,有很多捷径特别在光学成像上可能很大程度降低系统的效率。在选择部件时必须紧记的几个基本原则。
1. 摄像头的选择与应用的需求直接相关,通常考虑三点:
-
黑白还是彩色;
-
部件/目标的运动;
-
图像分辨率。
2.光学部件和照明这个至关重要的因素往往被人所忽略。
3.图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。
视觉系统代表厂家康耐视
作为全球领先的机器视觉公司,康耐视自从1981年成立以来,已经销售了100多万套基于视觉的产品,累计利润超过40亿美元。康耐视同时也是领先的工业ID读码器提供商。康耐视视觉系统帮助公司企业提高产品质量、消除生产错误、降低制造成本、提供低廉的高质量产品从而超越消费者期望。典型机器视觉应用包括检测缺陷、监控生产线、引导装配机器人以及跟踪、分类和识别零件。康耐视总部设在美国马萨诸塞州Natick郡,在北美、日本、欧洲、亚洲和拉丁美洲设有地区办公室和经销处。

公司官网:
https://www.cognex.cn/zh-cn
联系电话:400-008-1133
基恩士
基恩士(中国)有限 公司, 以下简称基恩士。在2001年9月设立了第一个销售网点。现在在上海(总部)、北京、天津、大连、青岛、深圳、香港等国内主要城市均设立了办事处。基恩士的创新产品不仅能够满足许多制造与研究行业客户现在的需求,而且还能够满足它们将来的需求。
公司官网:
https://www.keyence.com.cn/index.jsp
联系电话:400-736-7367
FESTO
德国 FESTO AG & Co. KG 成立于 1925 年,是自动化技术领域的全球领先厂商,也是基础和高级技术培训的全球市场领袖。公司总部位于德国埃斯林根,是一家独立的家族企业。其公司通过使用机器视觉系统,确保输入和输出的正确性。在搬运任务中,通过扫描代码或检测位置和质量,工业视觉系统监控您的生产过程。

公司官网:
https://www.festo.com.cn/cms/zh-cn_cn/index.htm
联系电话:400-6565-203
欧姆龙
欧姆龙以优质的人工服务和业界领先的自助服务相结合,对于不同客户类型,不同问题类型,不同的咨询商品,提供并引导客户最适合的咨询方式。从标准的服务型Call center转变为服务机能、市场机能、销售机能,利用大数据分析技术,为客户提供个性化的专业技术咨询和问题解决服务,一站式解决客户的产品咨询问题,让客户更满意的同时有效进行客户价值转化。

公司官网:
https://www.fa.omron.com.cn/
联系电话:021-60230333
灵猴
苏州灵猴机器人有限公司专注于智能制造与工业自动化核心零部件, 总部位于苏州,分别在北京、深圳、美国硅谷、德国慕尼黑设立研发中心及生产基地,销售网络遍及亚洲、欧洲和北美。每年以超营业额20%投入研发,并长期服务于世界500强之顶尖公司,其中涵盖熊猫电子、海目星、宁德、罗技、富士康、汇川、华硕、华为、博杰、银锐、奥音等国内外知名企业的成功案例,汇聚了行业的领导者。

公司官网:
http://www.linkhou.com/
联系电话:0512-66593362
视觉系统面临的难题
1.照明
如果有过在低光照下拍摄数码照片的经验,就会知道照明至关重要。糟糕的照明会毁掉一切。成像传感器不像人眼那样适应性强或敏感。如果照明类型错误,视觉传感器将无法可靠地检测到物体。
有各种克服照明挑战的方法。一种方法是将有源照明结合到视觉传感器本身中。其他解决方案包括使用红外照明,环境中的固定照明或使用其他形式的光的技术,例如激光。

2.变形或铰接球
它们是用计算机视觉设置来检测的简单对象。你可能只是检测它的圆形轮廓,也许使用模板匹配算法。但是,如果球被压扁,它会改变形状,同样的方法将不再起作用。这是变形。它会导致一些机器人视觉技术相当大的问题。
铰接类似,是指由可移动关节引起的变形。例如,当您在肘部弯曲手臂时,手臂的形状会发生变化。各个链接(骨骼)保持相同的形状,但轮廓变形。由于许多视觉算法使用形状轮廓,因此清晰度使得物体识别更加困难。
3.职位和方向
机器人视觉系统最常见的功能是检测已知物体的位置和方向。因此,大多数集成视觉解决方案通常都克服了这两者面临的挑战。
只要整个物体可以在摄像机图像内被查看,检测物体的位置通常是直截了当的。许多系统对于对象方向的变化也是强健的。但是,并不是所有的方向都是平等的。虽然检测沿一个轴旋转的物体是足够简单的,但是检测物体何时3D旋转则更为复杂。

4.背景
图像的背景对物体检测的容易程度有很大的影响。想象一个极端的例子,对象被放置在一张纸上,在该纸上打印同一对象的图像。在这种情况下,机器人视觉设置可能不可能确定哪个是真实的物体。
完美的背景是空白的,并提供与检测到的物体良好的对比。它的确切属性将取决于正在使用的视觉检测算法。如果使用边缘检测器,那么背景不应该包含清晰的线条。背景的颜色和亮度也应该与物体的颜色和亮度不同。
5.闭塞
遮挡意味着物体的一部分被遮住了。在前面的四个挑战中,整个对象出现在相机图像中。遮挡是不同的,因为部分对象丢失。视觉系统显然不能检测到图像中不存在的东西。
有各种各样的东西可能会导致遮挡,包括:其他物体,机器人的部分或相机的不良位置。克服遮挡的方法通常涉及将对象的可见部分与其已知模型进行匹配,并假定对象的隐藏部分存在。
6.比例
在某些情况下,人眼很容易被尺度上的差异所欺骗。机器人视觉系统也可能被他们弄糊涂了。想象一下,你有两个完全相同的物体,只是一个比另一个大。想象一下,您正在使用固定的2D视觉设置,物体的大小决定了它与机器人的距离。如果您训练系统识别较小的物体,则会错误地检测到两个物体是相同的,并且较大的物体更接近相机。
尺度的另一个问题,也许不那么明显,就是像素值的问题。如果将机器人相机放置得很远,则图像中的对象将由较少的像素表示。当有更多的像素代表对象时,图像处理算法会更好地工作,但有一些例外。
7.照相机放置
不正确的相机位置可能会导致以前出现过的任何问题,所以重要的是要正确使用它。尝试将照相机放置在光线充足的区域,以便在没有变形的情况下尽可能清楚地看到物体,尽可能靠近物体而不会造成遮挡。照相机和观看表面之间不应有干扰的背景或其他物体。
8.运动
移动有时会导致计算机视觉设置出现问题,特别是在图像中出现模糊时。例如,这可能发生在快速移动的传送带上的物体上。数字成像传感器在短时间内捕获图像,但不会瞬间捕获整个图像。如果一个物体在捕捉过程中移动太快,将导致图像模糊。我们的眼睛可能不会注意到视频中的模糊,但算法会。当有清晰的静态图像时,机器人视觉效果最佳。

9.期望
与视觉算法的技术方面相比,最后的挑战更多地涉及到您的视觉设置方法。机器人视野面临的最大挑战之一就是工作人员对于视觉系统能提供什么不切实际的期望。通过确保期望符合技术的能力,您将从技术中获得最大收益。您可以通过确保员工接受关于视觉系统的教育来实现这一点。
机器人视觉解决方案是我们实现机器人视野的几大挑战。即便变得越来越简单易用,还是有一些棘手的问题,很多因素影响机器人在环境中的视觉,任务设置和工作场所。而我们的行业从业者们也在朝着实现越来越精准的目标在不懈努力,坚持奋斗!

时间:2018-12-13 22:52 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
















