Numerical Coordinate Regression= 高斯热图 VS 坐标回归
创新点
这篇文章我本人非常喜欢,因为这个问题困扰我很久了,后面会细说。当看到这篇文章的时候我确实蛮激动的,后面发现还有几篇同样思路的论文,看来还是论文看的太少了。
目前的数值坐标回归任务存在于大量的实际需求中,例如人体关键点检测、人脸关键点检测、物体关键点检测和 3d 姿态,这些问题本质任务都可以归纳为数值坐标回归,故本文研究的是该类问题的一个通用解决办法,不针对具体任务,但为了方便对比,本文还是用人体姿态估计任务来说明。
具体来说目前主流的关键点回归就两种做法:
-
采用全连接层直接回归坐标点,** 例如 yolo-v1。** 该类做法的优点是输出即为坐标点,训练和前向速度可以很快,且是端到端的全微分训练;缺点是缺乏空间泛化能力,也就是说丢失了特征图上面的空间信息。
-
采用预测高斯热图方式**,然后 argmax 找出峰值对应的索引即为坐标点,例如 cornernet、grid-rcnn 和 cpn 等等 **。该类做法优点是精度通常高于方法 (1);缺点也很明显,从输入到坐标点输出不是一个全微分的模型,因为从 heatmap 到坐标点,是通过 argmax 方式离线得到的 (其实既然 argmax 不可导,那就用 soft argmax 代替嘛,有论文确实是这么做的)。并且由于其要求的输出特征图很大,训练和前向速度很慢,且内存消耗大。
针对上面两种主流方法存在的优缺点,我们是否可以设计一个模型,同时具备方法 (1) 的全微分训练,也具备 (2) 的空间泛化能力。故本文设计了一个 differentiable spatial to numerical transform(DSTN) 模块来弥补两着的 gap,并且设计的模块是没有训练参数的,可以在低分辨率高斯图上预测,主要作用就是让梯度流可以从坐标点流到高斯热图上,而不增加额外参数和计算量。
02
核心思想
首先需要对上面所提到的两种主流方案进行深入分析。
1 全连接直接回归坐标点
前面提到了空间泛化这个词,空间泛化是指模型训练期间在一个位置获得的知识在推理阶段推广到另一个位置的能力 ,举例来说,如果我在训练阶段有一个球一直在图片左上角,但是测试阶段球放在了右下角了,如果网络能够检测或者识别出来,那么就说该模型具备空间泛化能力。可以看出坐标点回归任务是非常需要这种能力的,因为我不可能每一个位置的图片都训练到。全卷积模型具备这种能力的原因是权重共享,然而对于全连接层,在 2014 年的 Network in network 论文指出 fully connected layers are prone to overfitting, thus hampering the generalization ability of the overall network。也就是说如果采用全连接输出坐标点方式是会极大损害空间泛化能力的,其实从理论上也很容易分析出来:在训练阶段有一个球一直在图片左上角,reshape 拉成一维向量后,全连接层的激活权重全部在上半部分,而下半部分的权重是没有得到训练的,当你测试时候输入一张球放在了右下角图片,拉成一维向量后,由于下半部分权重失效,理论上是预测不出来的,即没有空间泛化能力。而卷积操作由于权重共享,是可以有效避免的。总结一下:全连接方式所得权重严重依赖于训练数据的分布,非常容易造成过拟合,这个现象我在做关键点项目预测时候发现确实很严重。
2预测高斯热图
这种方法在人体姿态估计领域是主要方法,几乎目前所有新的模型输出都是高斯热图。以单人姿态估计为例,输出是一张仅仅包含一个人的图片,输入是所有关键点的高斯热图,label 是基于每个关键点生成的高斯图。如果每个人要回归 17 个关键点,那么预测输出特征图是 (batch,h_o,w_o,17),即每个通道都是预测一个关节点的热图,然后对每个通道进行 argmax 即可得到整数型坐标。
前面说过基于高斯热图输出的方式会比直接回归坐标点精度更高,原因并不是高斯热图输出方式的表达好,而是由于其输出特征图较大,空间泛化能力较强导致的,那么自然能解释如果我依然采用 (1) 直接回归坐标的方法预测,但是我不再采用全连接,而是全卷积的方式依然会出现精度低于高斯热图的现象,原因是即使全卷积输出,但是像 yolo-v2、ssd 等其输出特征图很小,导致空间泛化能力不如方法(2)。
单从数值上来看,肯定是直接回归坐标点方式好啊,因为直接回归坐标点的话,输出是浮点数,不会丢失精度,而高斯热输出肯定是整数,这就涉及到一个理论误差下界问题了。假设输入图片是 512x512,输出是缩小 4 倍即 128x128,那么假设一个关键点位置是 507x507,那么缩小 4 倍后,即使没有任何误差的高斯热图还原,也会存在最大 507-126*4=3 个像素误差,这个 3 就是理论误差下界。如果缩小倍数加大,那么理论误差下界还会上升。所以目前大部分做法折中考虑速度和精度,采用缩小 4 倍的方式。
高斯热图回归的 loss 一般都是 mse,这就会出现另一个问题。
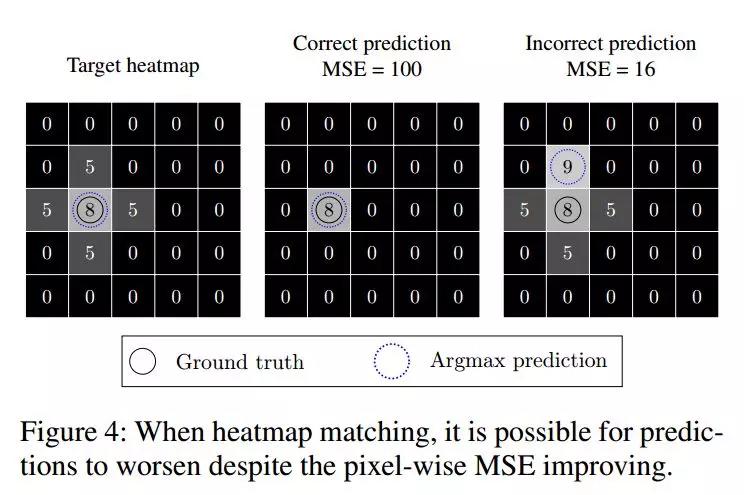
第一幅图是 target 热图,第二副和第三副图是假设预测出来的两种情况,正常情况下,第二副预测的更准,但是实际上如果采用 mse loss, 那么第三副图的 loss 比第二副小,这就出现问题了,会导致预测的关键点是不准确的。
总结一下,虽然高斯热图预测的精度通常高于回归的方法,但是其存在几个非常麻烦的问题:(1) 输出图很大,导致内存占用多、推理和训练速度慢;(2) 存在理论误差下界;(3) mse loss 可能会导致学习出来的结果出现偏移;(4) 不是全微分模型;
作者设计的整体流程如下:
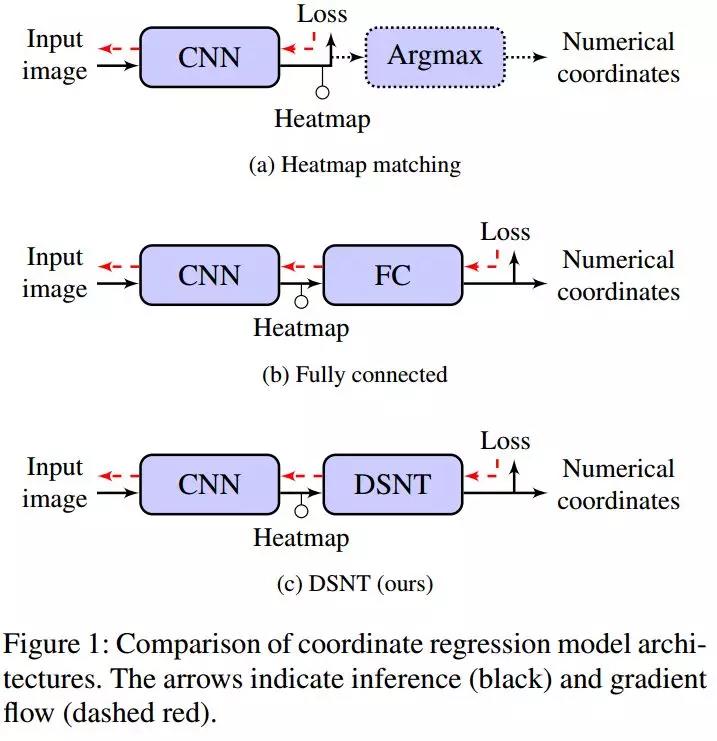
(a) 是目前主流做法,可以看出梯度流不是端到端的;(b) 是在高斯热图后面连接一个全连接层来直接回归关键点坐标,梯度流是端到端的;(c) 作者提出的 DSNT 模块做法。
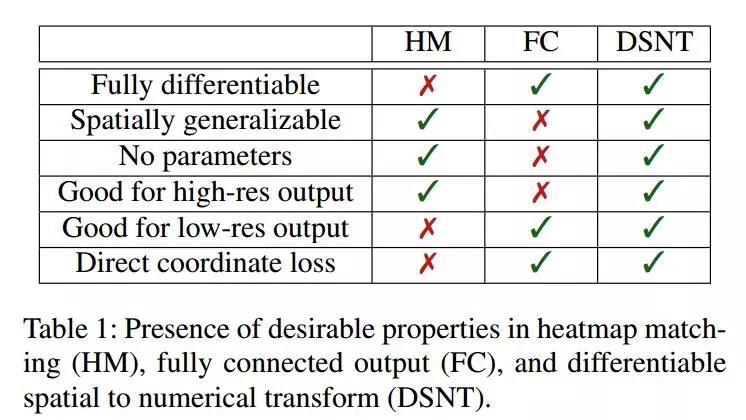
可以看出,方式 (a) 缺点是不是全微分,低分辨率输出情况下精度较低;(b)的缺点是丢失了空间泛化能力,非常容易过拟合,高分辨率情况下精度不行;而 (c) 具备了全部优点**,个人觉得最大优点是可以在低分辨率情况下得到近似相同精度的结果。** 实验结果表明,如果 CNN 模型是 ResNet-34,在后面接一个 DSNT 模块和不接情况下,当输出热图是 7 × 7 pixel 时,带 DSNT 的精度优于不带的 90.5%,当输出热图是 56x56 pix 时候,优于 2.0%。也就是说本文方法主要优势是可以进行低分辨率高斯热图预测。
前面分析了半天全卷积的好处,那么自然我们的输出也是采用全卷积方式,并且在全卷积特征图后面接 DSNT 模块,将空间高斯热图转换为坐标点。本文设计和目前高斯热图预测主要区别是我们并不是强制要求一个 loss 直接作用到高斯预测热图上,(b) 的 label 就是强制 Loss 学习到高斯热图,loss 直接作用在输出特征图上,而本文采用的是 (c),通过优化整个模型输出的预测坐标的损失来间接学习热图,也就是 loss 是基于预测关键点和真实关键点的,热图的学习完全是网络自发的 (也不算自发,加了正则),这就是本文和其他常用做法的最主要区别了,后面会细说。
03
网络结构
下面开始讨论具体实现。首先明确 DSNT 模块的输入和输出,假设 CNN 原图输入是 (batch,h,w,3),输出是(batch,h//4,w//4,17) 表示 17 个关键点回归,用表示,DSNT 作用在每一个通道上,输出是 (batch,17,2) 表示 17 个关键点的 x,y 坐标。
(1) 对每一个通道输出的高斯热图进行 normalized,定义为 。
。
忽略归一化分母,可以表示为 ,作者设计了 4 种 normalized 手段,具体为:
,作者设计了 4 种 normalized 手段,具体为:
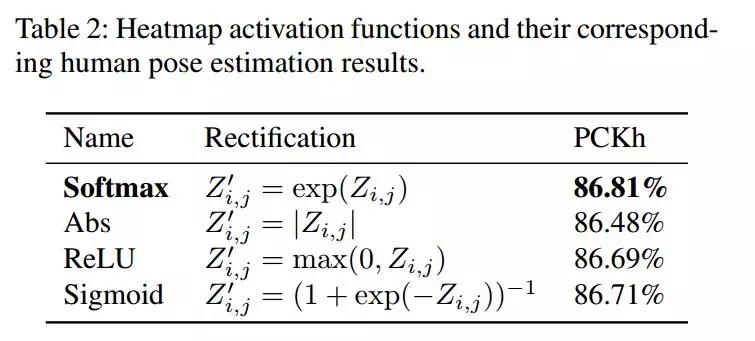
可以看出,选择不同的归一化手段,最终结果差距不大,但是由于表中 softmax 手段优异一些,故作者选择了 softmax 作为 normalized 函数。
为啥要归一化到 0~1 呢?是因为作者希望 DSNT 输入是一个离散概率分布,后面有用。
(2) 转换为坐标点
先定义两个矩阵 X 和 Y,其宽高和输入 DSNT 的宽高一致,其具体数值计算为:
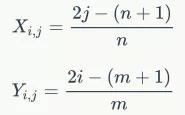
 ,这里 m= 宽,n= 高,这样的做法可以将 X 和 Y 坐标值 scale 到 (-1,1) 之间。一个特殊实例如下:
,这里 m= 宽,n= 高,这样的做法可以将 X 和 Y 坐标值 scale 到 (-1,1) 之间。一个特殊实例如下:
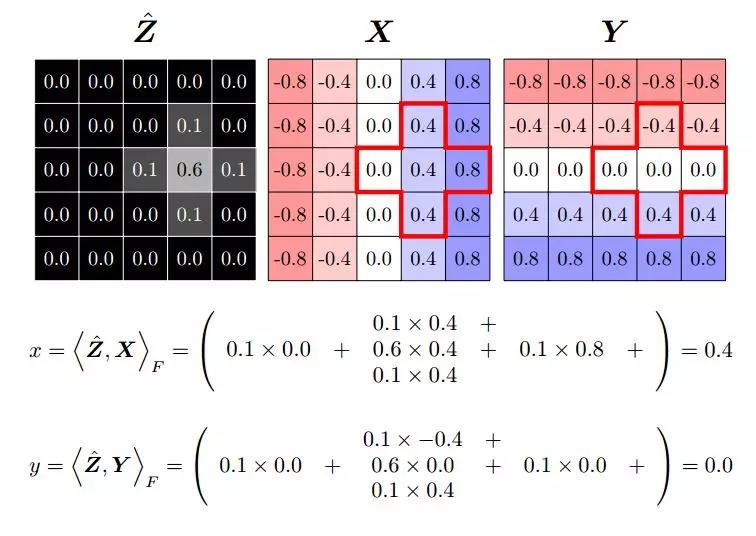
可以看出,x 坐标实际上就是 和 X 矩阵进行 F 范数结果,y 坐标实际上就是
和 X 矩阵进行 F 范数结果,y 坐标实际上就是 和 Y 矩阵进行 F 范数结果 (F 范数是欧式空间二范数的推广,计算方法就是逐元素点乘)。可以看出,如果归一化的高斯热图只有一个峰值,那么采用这种变换手段可以直接得到坐标点。这个变换过程就是本文的核心。
和 Y 矩阵进行 F 范数结果 (F 范数是欧式空间二范数的推广,计算方法就是逐元素点乘)。可以看出,如果归一化的高斯热图只有一个峰值,那么采用这种变换手段可以直接得到坐标点。这个变换过程就是本文的核心。
好了,由于 是 0~1,且和为 1,那么满足概率分布条件,故可以写成:
是 0~1,且和为 1,那么满足概率分布条件,故可以写成:

c 是某一个通道的输出坐标,2 个值,上式就是随机变量 X 和 Y 的联合概率分布。仔细观察可以发现,通过 DSNT 变换后得到的 2 个坐标点,其实就是上述联合分布的均值,写成:

如果大家忘记了均值咋算,那么我贴一张图:

总结,经过上述两步骤后,得到如下汇总式子:

注意看:虽然我们前面都是假设 DSNT 的输入是高斯热图,但是实际上目前我们没有加入任何先验,让网络学习到高斯热图性质,但是我们仔细看 X 和 Y 值,可以看出,在关键点中心点处,X 值关于 X 轴对称,Y 值关于 Y 轴对称,这样的对称属性对生成高斯热图有一定的帮助,网络会倾向于学习出左右和上下对称的热图。如下图所示:
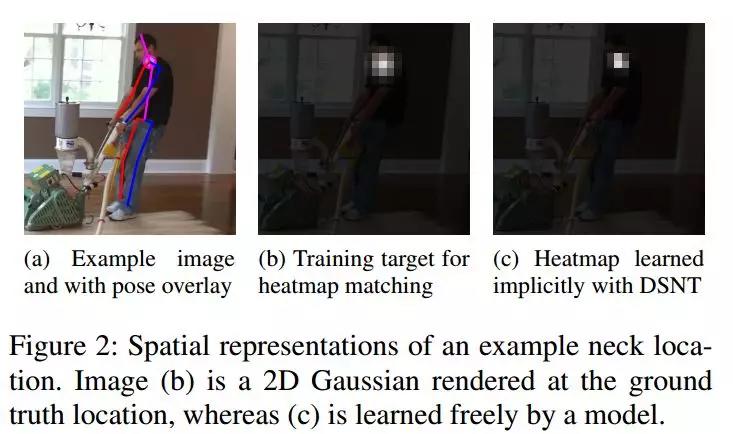
(a)是输入图片,(b)是常用的高斯热图预测额 label,而 (c) 是本文设计的没有加任何高斯约束自动学习出来的热图,虽然和高斯热图还有些差距,但是基本满足关于中心点对称的属性。
作者试图分析了一个问题:没有任何高斯约束的网络训练会不会非常容易受到外点影响,导致训练不稳定?因为一旦预测的热图由 max 外点干扰,那么后面的 DSNT 模块肯定就变换错误了,作者说不会,因为在训练时候如果出现这种现象,那么就导致一个非常大的 Loss,促使网络慢慢去掉外点干扰。
好了前面基本就讲完了整个网络结构了。下面开始分析 Loss。
loss 设计就比较简单了,由于是坐标点回归,那么一个非常自然的 loss 肯定是误差平方和,即:

p 是 label,是 DSNT 模块输出值。
我希望大家能知道为何这里的 Loss 只是两个点之间的二范数而已,但是梯度却是作用在了整个热图上面,原因是这个输出的预测值其实是均值,而对均值有贡献的位置是整个图,故梯度反向时候会作用在整个热图上。
如果仅仅上面这个 Loss 肯定是可以 work 的,但是如果没有加入任何约束,那么会出现同一个关键点会产生各种形状的热图,虽然对我们的最终结果没有影响,但是总感觉过于自由了。例如网络可能会学出一种非常大方差和非常小方差的高斯热图,从稳定性方面考虑,那么在实际情况下,我们肯定是需要小方差的高斯热图,而且在实验中发现认为引入一些先验是有助于网络训练的。故我们还要探讨如何加入先验。
加入先验的一种最简单最直接做法就是正则 Loss,故我们可以对正则项引入高斯热图先验。总体 loss 为:

(1) 方差正则
第一种可以想到的正则是控制方差,前面说过我们希望学出高斯热图,且方差要小,那么很自然我们可以写成:
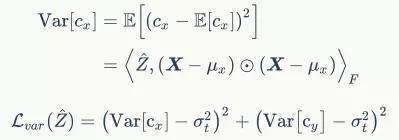
第一个式子是计算方差,只和预测出来的坐标有关,第二个是最终的方差正则项,通过给予 x 和 y 方向同样大小的方差约束,就有助于学习出高斯热图。
(2) 分布正则
其实容易想到另一种更好的正则。你希望的不就是要得到高斯热图吗?那么由于你已经变换到了概率分布中,那么我希望他的输出分布是二元高斯,那么肯定用 KL 散度啊,KL 散度大量用于衡量两个分布相似性上,在 GAN 中应用超级广泛。那么我们有:

是二元高斯分布,这样的设计就可以强制网络学到高斯热图。由于 KL 散度有:1. 永远大于等于 0,但是不一定小于 1; 2. 非对称性,故作者引入了更好的 KL 散度变种:Jensen-Shannon,其是 KL 散度的变体,值域范围是 0~1,且是对称的。
其实我们可以换一个角度考虑,例如 SVM Loss 一样,我们可以认为坐标预测的 loss 是正则 Loss,而分布正则的 loss 是主 Loss,从这个角度来看,那么本论文所提方法其实和原始的直接高斯热图回归做法并无不同,还是直接回归高斯热图,不过额外增加了一个坐标回归正则项,为了能得到坐标点,引入了 DSNT 模块而已。
作者通过实验对比,结果如下:
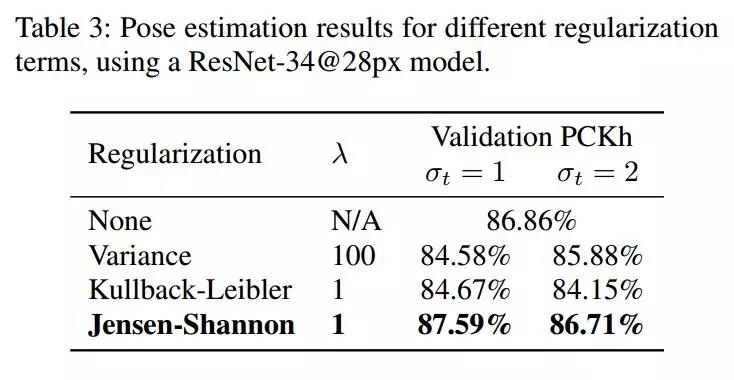
可以看出 JS 更好一些,故最终最终选择的正则是 JS 分布正则。
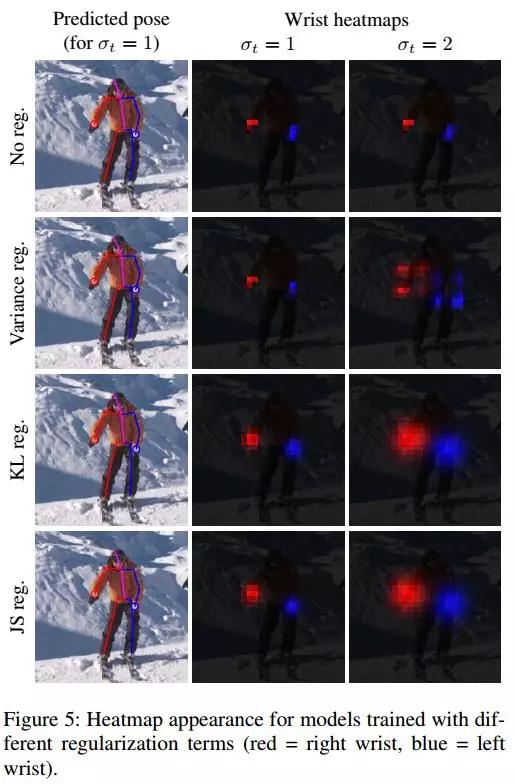
上图是在不同的方差大小情况下学习出的热图形状,可以看出 JS 正则的效果不错,但是可以看出方差影响很大,这个在具体项目中非常关键,需要小心设计。还可以看出在方差正则中,由于只是限制了方差相等,均值为 0,故他无法直接学习出高斯热图,而是将热图分成关节周围的四个斑点。
04
实验
作者设计了 2 组对比实验,分别是 ResNet,通过空洞卷积后,输出热图大小是 14x14pix,和 Stacked hourglass。输出热图大小是 64x64pix。

DSNTr 是指带正则。先看左图,本文设计的 DSNT 模块在低分辨率输出情况下有压倒性优势,当高分辨率输出时候依然会好一点,这个好一点应该是弥补理论误差下界导致的,也就是说在高分辨率输出时候优势不大;再看中间图,随着网络深度加深,并不是一直直线上升的,在 resnet-50 和 resnet-101 情况下精度几乎没有提升;再看右图,stack 的数目增加,精度也可以增加,说明这种网络结构还是不错的。总体而已,加了正则的 DSNT 方法始终都是最好的。
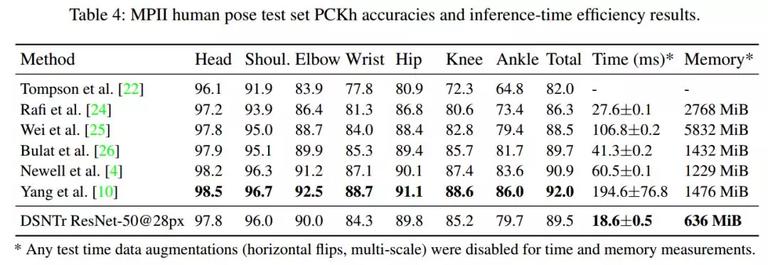
上表可以看出,我们采用了 28x28 的输出,精度依然非常高,且速度和内存占用都是最小的。
还有一些实验细节,我就不写了,大家有兴趣的可以自己看原文。
05
扩展
纵观全文,感慨颇多。因为我在做关键点热图预测时候,始终无法有效克服这个理论误差下界问题,我的解决办法是:(1) 生成高斯热图时候不进行过度量化操作;(2) 图片的裁剪缩放比例不变,而是通过 padding 来确保输入图片一致;(3) 输出是输入的 1/2。通过这些手段,我可以控制理论误差下界低于 1 个 pix,但是依然没有解决本质问题。然后我参考 MultiPoseNet 做法,尝试了 FC,但是如前面所示,非常容易过拟合,主要原因是 FC 的输入是高斯图,样本过于简单。
其实据我所知,还有一种办法可以克服理论误差下界问题,那就是 cornernet 做法,学习一个 offset,这个 offset 其实就是误差下界,通过对预测值加上 offset,一样是可以有效解决的。
但是目前高斯热图预测的做法最大问题是速度太慢,内存占用太多。而本文的做法在低分辨率情况下依然可以达到很高的精度,这点是我最喜欢的。这样的优点就可以让我将关键点回归和目标检测任务合并输出,同时完成两个任务,如果没有本文做法,由于高斯热图预测需要大分辨率图,而目标检测都是小分辨率图,这个就矛盾了,效果就不太好。
其实高斯热图回归还有一个问题,我暂时不知道如果采用本文预测方式能不能避免,我要做实验才能发现。那就是当关键点和关键点之间的可区分性比较低时候,预测很容易失败,表现为一个输出通道上出现多个高斯峰值,此时 argmax 就会导致关键点定位失败。目前我的做法就只是让网络充分训练,或者加可判别性特征,或者加可区分的正则 loss;或者加强通道间交流例如自注意力机制和 grid rcnn 做法。
当然如果关键点出现遮挡时候,本文应该也很难有效应对吧。
前面说过,将热图输出转换为回归输出不只是本文这一种做法,还有几篇优秀的问题,后面有空在分析,列表如下:

欢迎交流

时间:2019-01-07 00:17 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
- [机器学习]人工智能十年回顾:CNN、AlphaGo、GAN……它们曾这
- [机器学习]20年以后,半数工作将被人工智能取代?这些“高危行业”有哪些
- [机器学习]人工智能十年回顾:CNN、AlphaGo、GAN……它们曾这
- [机器学习]年终总结:2021年五大人工智能(AI)和机器学习(ML)发展趋势
- [机器学习]神经科学如何影响人工智能?看DeepMind在NeurIPS2
- [机器学习]美俄人工智能军事应用
- [机器学习]民调不靠谱?人工智能预测拜登获胜
- [机器学习]人工智能正在误导我们的广告,是时候纠正这些错误了
- [机器学习]美国陆军研究如何组建人-人工智能系统团队
- [机器学习]人工智能的下一个拐点:图神经网络迎来快速爆发期
相关推荐:
网友评论:















