基于知识图谱的警用安保机器人大数据分析技术
摘 要:构建大数据支撑下的智能应用是公安信息化发展的趋势,警用安保机器人大数据分析平台的核心功能包括机器人智能人机交互和前后端融合的研判。阐述了知识图谱技术在警用安保机器人人机交互和情报分析领域应用的突出优势,并从知识构建、推理挖掘、决策服务等方面提出了警用安保机器人建设的总体方案。
关键词:知识图谱 机器人
引言
警用安保机器人综合运用物联网、人工智能、云计算、大数据等技术,具备自主感知、自主行走、自主保护、互动交流、便民服务、警用巡逻等能力,可辅助警察完成基础性、重复性、危险性的工作,持续推动警务服务升级。随着人工智能的不断发展,警用安保机器人更加关注机器人智能化能力,以及机器人与现有公安信息化流程无缝对接的大数据智能分析平台的建设能力。智能化已经成为衡量机器人性能的首要标准。
本文总结知识图谱技术在警用安保机器人大数据分析领域应用的技术优势,并围绕警用安保机器人后台智能人机交互和前后端融合的大数据情报分析研判两大核心功能提出系统建设的总体方案。
一、知识图谱技术
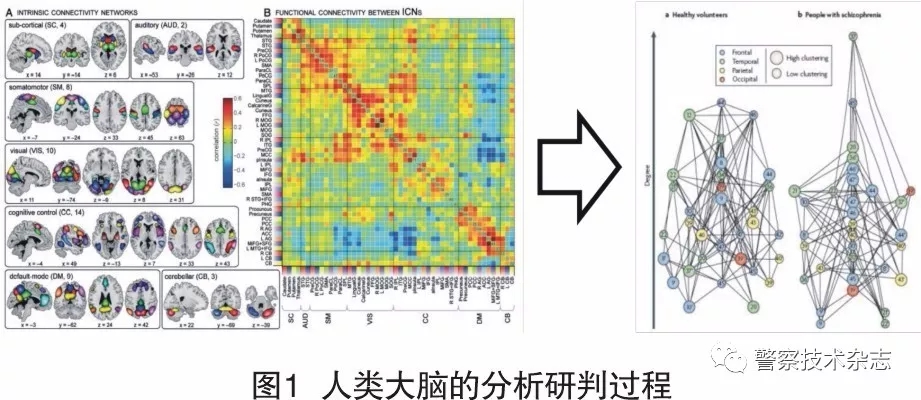
目前,人工智能的进展突出体现在以深度学习为代表的机器学习以及以知识图谱为代表的知识工程两大领域。脑科学领域的一些研究进展为机器人的研发带来了新的启示。相关研究显示,人脑在进行阅读、问答、计算等非反射性活动时,通常会调动大脑中的多个功能区域,同时进行协作决策。如图1所示,人脑的网络化协作过程主要是为了充分使用不同区域所获得和存储的信息,从而做出综合性的决策研判。由此可以看出,网络是一种建模多源信息和多种要素的有效方法。
知识图谱(Knowledge Graph)是一种语义网络,包含大量实体和概念及其之间的语义关系,知识图谱中所富含的实体、概念、属性、关系等信息,提供了从“关系”角度去分析问题的能力。因此,为了充分组织和管理人机交互过程中和机器人自感知过程中获取的海量数据,知识图谱技术的第一阶段,应从多源异构数据中识别出目标、行为、时空关系等构建系统的本体模型,进而,将要素通过相互作用的方式系统整合,形成目标关系的知识关联网络。因此,知识图谱在警用安保机器人智能化领域的应用具有巨大潜能。
二、警用知识库构建技术
机器人的人机语音交互功能是决定机器人友好性和智能性的关键因素,智能问答是未来智能化发展中人机交互的主要方式。智能问答的核心在于聊天语料和知识推理两部分。当前,互联网和专有网络上,研究人员已建立了通用问询知识库包含衣食住行等多个方面的常用知识。然而,针对警用安保机器人面向公安业务的知识库目前仍处于研究阶段。
从技术层面,问答系统按照知识来源可以分为检索式问答(Retrieval-based Question Answering, RQA)和基于知识库的问答(Knowledge Base Question Answering,KBQA)。RQA的知识来源为非结构化的文档,针对用户的问句对一个文档集合进行排序,并返回排序结果,或者将单个文档中与问题最相关的特定语句返回。KBQA的知识来源为结构化的知识库,针对用户的问句,利用知识库进行查询和推理,得出最终答案。区别于聊天机器人,KBQA更关注事实性问题;区别于RQA,KBQA返回的不是文档排序结果或相关的句子,而是直接给出答案。针对公安行业,警务安保机器人更应以正规、明确的方式对群众提问进行准确回答。因此采用KBQA的方式,构建警用安保机器人知识库,问答系统需要通过自然语言处理技术,将用户问句中的主题实体识别出来,并链接到知识库中对应的实体,通过关系路径推断推理出主题实体到答案节点的路径,从而得到最终的问题答案。
三、警用机器人后台情报分析技术
警用安保机器人具有全面的数据感知功能,将机器人前端感知数据与已建的公安大数据分析系统深度融合,将警用安保机器人巡逻工作纳入公安情报分析、处置流程中,使其成为情报分析系统的重要数据来源,后端的情报研判结果可以直接指挥机器人的下一步行动,形成公安大数据情报分析闭环。因此,公安情报分析能力是警用安保机器人大脑的重要组成部分。
在情报分析领域,传统的情报研判模型通常是由专家系统和逻辑推理计算完成,其存在两个方面的缺陷。首先,专家知识的获取严重依赖领域专家的知识总结能力,但在实际工作当中,专家知识的总结往往存在着挂一漏万的情况,大量细节性、隐含但非常关键的判定知识难以被引入到专家系统中,这就导致专家系统在实际应用场景中效果往往不够理想。另一方面,传统的推理系统往往将各个知识和要素当作孤立的个体对待,对于知识与知识、要素与要素、知识与要素之间的关联关系没有非常好的建模。这就导致对于决策信息的研判与分析十分片面和孤立,单纯依赖传统专家与推理系统分析研判模型难以满足公安等复杂场景下的实际业务需求。
基于知识图谱的情报分析模型采用网络组织的方式对数据对象进行组织,其固有优势明显,适合应用在机器人后台中提供分析决策能力。首先,在知识图谱中,要素对象和对象间关系是能够独立进行管理的,模型可以动态调整知识图谱中节点和边之间的关系,将目标的识别过程和知识的组织过程有效结合起来。其次,知识图谱本身和推理系统之间并不是耦合的,用户可以根据需要定义不同的推理规则,从而挖掘知识图谱当中的相关关系。这种知识与模型分离的数据管理方式,保障系统能够支持不同类型的推理决策模型,同时能够和后续的预测预警模块无缝对接,系统的灵活性大大提高。在系统进行知识升级时,如果是目标识别模块有所改进,可以通过更新知识图谱中的对象与关联关系网络进行知识模型升级;如果是后续的预测预警模块进行了升级,则可以脱离知识图谱,独立进行模型升级。
目前,基于知识图谱的情报分析技术已应用于各国的警务情报项目中。其中美国Palantir公司的Gotham平台构建出一套语义知识搜索挖掘平台,总结提炼八个信息实体:人、车、位置、罪案、逮捕、文件、备注与其他,并构建不同个体间的知识关联,极大提高了破案准确率和效率。在国内,知识图谱技术应用于辅助公安刑侦、经侦等警种的案件侦破工作。针对特定案件,按照人、事、地、物、组织构建社会关系网,结合专家研判经验规则和知识,迅速调用PB及以上量级数据之间的关系,分析推演出案件的研判结果。
四、警用安保机器人后端系统总体架构
警用安保机器人后端系统总体架构的核心功能包括:机器人人机交互平台和机器人大数据平台,如图2所示。
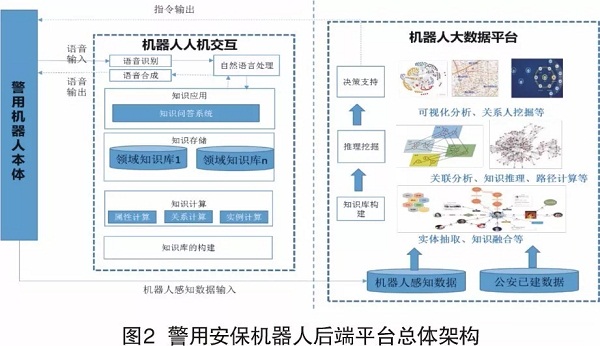
(一)机器人人机交互平台
包含了知识库的构建、知识存储、知识应用。前端机器人本体将采集到的语音输入至语音识别模块,经过自然语言处理,将结构化的实体输入知识问答系统,获取答案,并通过语音合成模块进行输出播放。
1. 知识库构建
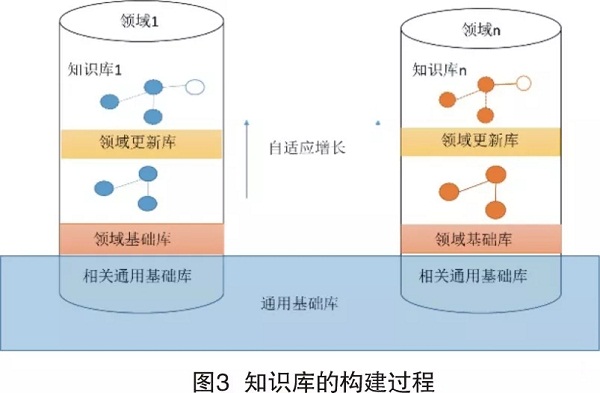
如图3所示,进一步描述了知识库的构建过程。知识获取的主要目的是融合通用知识基础库与领域专业基础库,抽取其中的概念、实例、属性和关系。通用基础库是指从常识知识中选取和领域相关知识构成的知识库。领域基础库是用来描述领域相关的其他基本知识,如便民服务更关注的证件办理、安保巡逻更关注的安全常识,其来源于专业领域字典、核心词汇表等。其次,为了获取当前最实时的领域知识,建立领域更新库,不断更新和完善知识库内容。
2. 知识计算
包括属性计算、关系计算和实例计算。
3. 知识存储
经验证的海量知识存储于图数据和关系数据库中。
4. 知识应用
通过建立知识图谱,可开展语义检索、个性化推荐、知识问答。其中警用机器人直接调用知识问答应用。
(二)机器人大数据平台
包含了知识库构建、推理挖掘和决策支持。将机器人感知数据与公安大数据进行深度融合,形成公安情报分析知识库,利用关联分析等算法,实现可视化分析、关系人挖掘等上层应用,并将分析结果反馈到机器人本体,指导本体下一步工作。
1. 知识库构建
提取的人、事、地、物、组织等要素对象,将其作为知识图谱当中的实体进行建模。其次,基于实体—链接二维理论,将实体之间的关系(例如:社交关系、家庭、户籍、资金往来、住宿出行等关系)抽象为链接表示为连线,存储在图数据库中,形成不同主题的知识图谱。
2. 推理挖掘
能够从已有知识中发现隐含知识。在知识图谱之上,通过开发各类数据研判模型,如对象关系的异常检测、与特定事件关联关系的查询等,就可以有效支撑情报分析中的各项数据研判任务。
3. 决策支持
分析研判结果结合全息图像可视化、时空可视化、图可视化分析等可视化分析技术,将数据中多维度知识以易于人类理解的方式尽可能多地提供给决策专家。专家通过系统一键下发功能,可快速向前端警用安保机器人下发巡逻指令,到达指定地点,开展数据搜集或巡逻工作。
五、成果试用
在公安工作的众多场景,特别是安保工作中,有很多涉及到基于公安行业安保知识图谱的人机交互场景需求。例如:安保工作中的安保机器人自动区域巡逻、基于动态人脸识别与分析的重点人员现场识别与核验系统、基于安保人员人脸识别与证件识别双因子身份认证系统等场景中,通过安保机器人的引入,能大大提高安保工作的效率、水平和安全能力。同时通过将前端安保机器人与后台大数据分析平台建立高速、高效、安全的连接与互动通道,能够切实将后端的行业知识处理分析能力和行业知识图谱直接服务于一线工作,从而使前端感知机器人变成能够交互、学习、思考的智能交互机器人。这点在重要场所的安保机器人实验工作中已经得到检验,对系统架构、技术平台、安全互联、知识图谱的场景化应用进行了实地验证。下一步将继续扩大实验场景和范围,力争在完善功能、技术架构、知识图谱的基础上,将安保机器人的应用场景推向更大范围。
六、结语
随着大数据、云计算和人工智能等技术的快速发展,以智能化为核心的警用安保机器人大数据平台已初步应用于公安实战。利用知识图谱理论将公安多源、异构大数据进行有效组织,构建以“知识”为核心的知识库、关联网络和推理模型,可为警用安保机器人的应用提供重要的技术支撑。
参考文献:
[1] 陈甜甜.警用巡逻机器人发展研究[J]. 安全技术参考, 2017(4):3-11.
[2] 仇韫琦. 智能时代人机交互的新方式——KBQA的前世今生. http://mp.weixin.qq.com/s/LkRrPXEjGRugw9LMSS9uJg[EB/OL].2018.
[3] 张华平.从Palantir看公安大数据应用[EB/OL].http://mt.sohu.com /20160523/n450910580.
[4] 明略数据. 明略数据实现人机同行[J]. 网络安全和信息化, 2017(9):19.
[5] 王元卓, 贾岩涛, 赵泽亚. OpenKN网络大数据时代的知识计算引擎[J]. CCF 通讯, 2014, 10(11): 30-35.

时间:2018-08-22 00:44 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:















