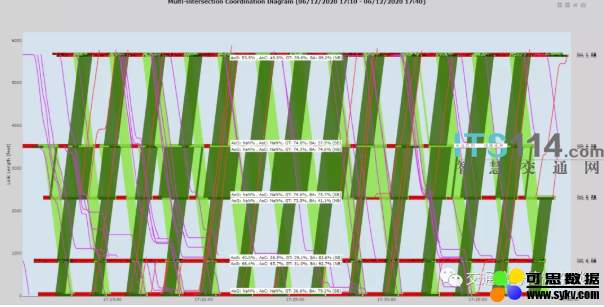
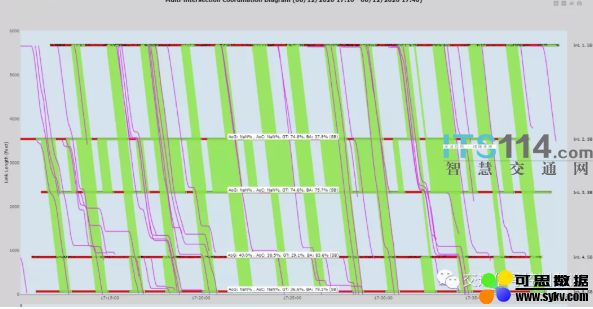
融合移动轨迹数据的交通控制时空网图
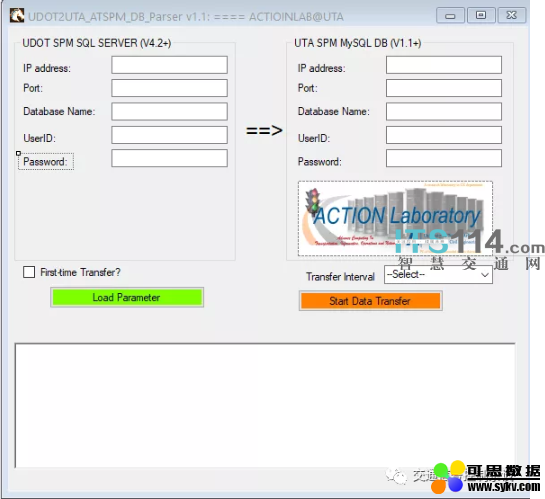
这个任务最难的就是不同数据源时间的匹配问题。主要是很多数据厂商是手机收集的轨迹数据,位置信息上来后,在打时间戳的时候有时候用GPS,有的是手机网络,有的用手机本地时钟。这些时钟有快有慢,总有几秒的误差。但我们在日常甚至在freeway上用是感觉不到这个差别的。但时钟问题在信号控制的时空网立刻暴露出来了,从过去的文献看,很多研究最后都显示很多车闯红灯(实际上不是),这个很难用过集体调时钟的办法解决,因为有的轨迹时钟快有的轨迹时钟慢无法协调。在处理这个数据源的时候我也一直提心吊胆,因为真实世界里的数据远没那么好,教科书一样的理想图基本上看不到。更要命的是,交通信号控制系统时钟还不一定准呢!所以这里坑不少。幸运的是,我们的实验结果显示,轨迹数据时钟是准的,交通控制系统的时钟恰好也是准的。而且匹配的非常好。看到闯红灯的数据其实都是右转进来或退出的车辆,这个是允许的。下一步就要设计一些基于移动估计的城市交通评价的新参数,希望能从本地开始,逐渐把交通控制评价体系从固定点数据源进化到新一代的基于移动数据的评价体系。Please stay tuned. 备注,本显示系统为我们课题组自己开发的交通信号评价系统。因为用的是不同的技术所以无法和常用的UDOT的来源系统合并,但目前已经可以从UDOT系统数据路里提取实时数据了,所以从一年前的的软硬件一体方案现在变成了一个纯软件方案。争取先铺出去一些,把实践中出现的坑都填一下,增加一下稳定性。还有几个有趣想法明年再说吧。

时间:2020-07-23 00:33 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章














