计算机视觉技术帮助机器人更好抓取透明物体
据外媒报道,为了看到并抓住物体, 机器人通常会使用像微软Kinect这样的深度感应相机。尽管这种相机可能会受到透明或发光物体的影响,但来自卡耐基梅隆大学的科学家们已经开发出了一种解决办法。深度感应相机的功能是将红外线激光束射到物体上然后测量光从物体的轮廓反射回来及再反射至相机上感应器所需要的时间。
虽然这个系统在相对暗淡的不透明物体上工作得很好,但它在透明物体上却存在问题,因为大部分光线都能穿过透明物体,或是闪亮的物体会散射反射光。这就是卡耐基梅隆系统发挥作用的地方,他们利用了一个彩色光学相机,其也可作为深度感应相机。
该套装置利用了一种基于机器学习的算法,该算法能在同一不透明物体的深度感知和彩色图像上进行训练。通过比较两种类型的图像,该算法学会了推断彩色图像中物体的三维形状,即使这些物体是透明的或会发光。
此外,虽然只有少量的深度数据可以通过直接激光扫描这类物体来确定,但收集的数据能被用于提高系统的准确性。
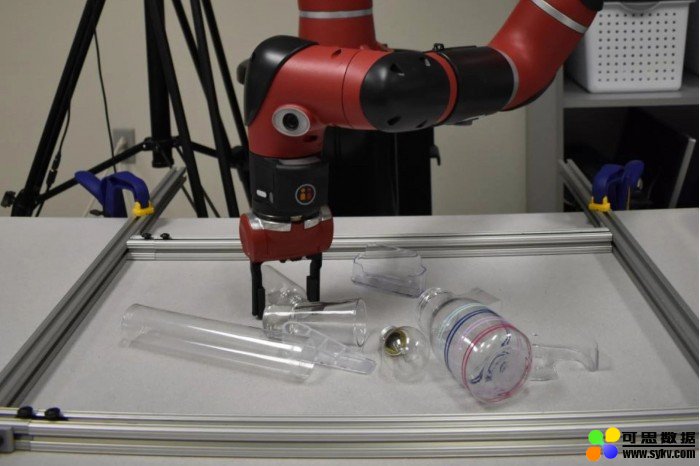
在目前进行的测试中,跟只使用标准深度传感相机相比,使用新技术的机器人在抓取透明和发光物体方面表现要出色得多。

时间:2020-07-19 00:32 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论:
最新文章

热门文章














